





























Checking Sliding Contact
The device can monitor the runtime of the motor drive. This function is used to identify failures of the motor-
drive mechanism during the switching procedure and to initiate actions (for example, blocking) if required. If
you want to use the motor supervision time, you must route the motor run signal (most significant binary
input) and set the motor runtime.
The maximum motor runtime can be calculated by measuring – during commissioning – how long the tap
changer needs from the time point of the incremental command until completion of the tap changing. The tap
changer needs approx. 7 s to 10 s for one tap-position change. Select the runtime to be 2 s to 3 s longer than
the measured time. This takes into account a tolerance for the aging of the tap changer. If the tap changer has
a run-through setting, select the motor lead time based on the run-through time of the switching tap (+ toler-
ance time).
If the tap-changer position is not manually updated during the secondary test, you must deactivate the tap-
changer supervision. Otherwise, the voltage control is blocked after every switching procedure.
i
i
NOTE
Once you have completed the secondary test, you must activate the tap-changer supervision again.
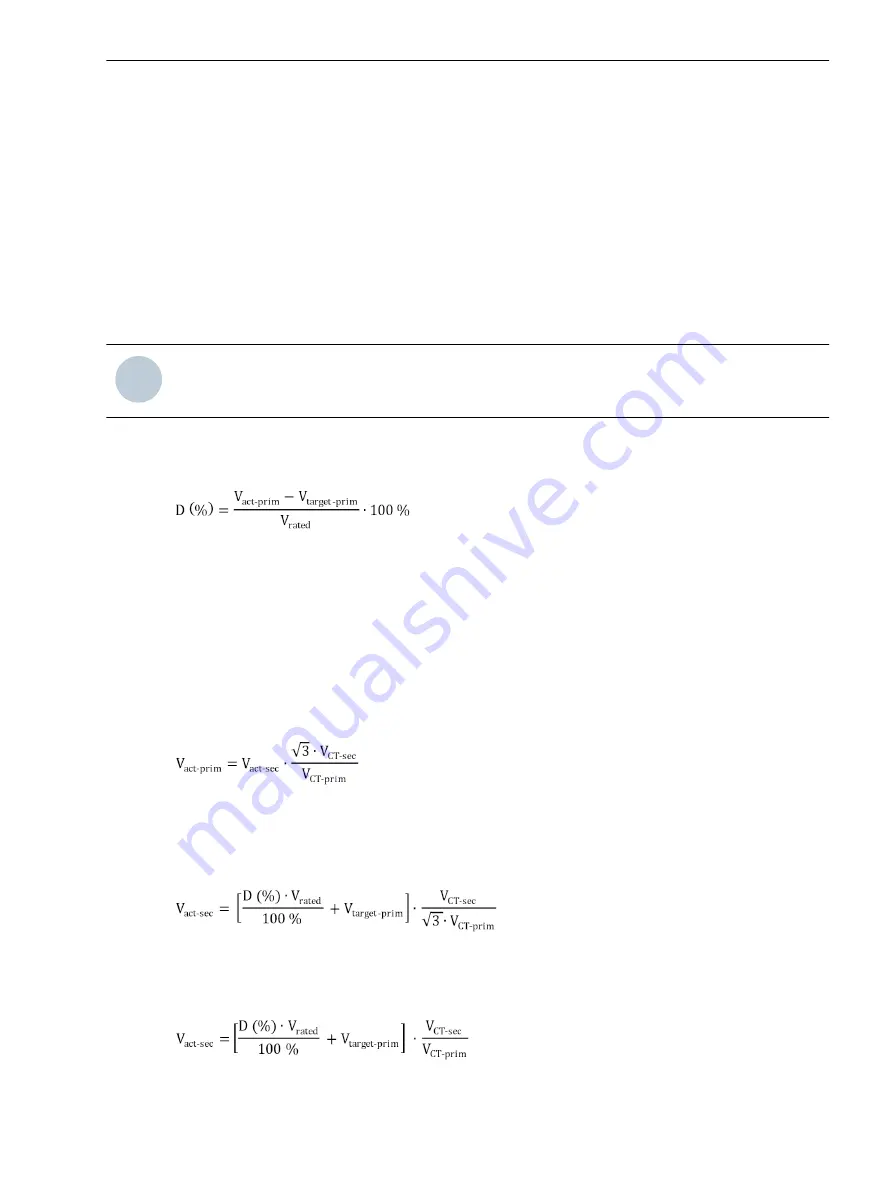
Check of the Voltage-Control Function
The measured control deviation D results from the following formula:
[fo_ibs_regelab, 1, en_US]
where:
V
act-prim
Actual voltage, primary
V
target-prim
90V V.contr.2w
→
Target voltage
primary
V
rated
90V V.contr.2w
→
General
:
Rated voltage
If you set the 3-phase measuring point voltage to
VT connection
=
3 ph-to-gnd volt. + VN
, the
measured voltage primary V
act-prim
results from the ratio of the voltage transformer parameters
Rated
secondary voltage
V
CT-sec
and
Rated primary voltage
V
CT-prim
.
[fo_ibs_prim_measur_volt, 1, en_US]
This results in the secondary voltage V
act-sec
to be fed in depending on the control deviation D to be achieved
with the connection type
VT connection
=
3 ph-to-gnd volt. + VN / 3 ph-to-gnd voltages
being:
[fo_ibs_prim_measur_volt_2, 1, en_US]
This results in the secondary voltage V
act-sec
to be fed in depending on the control deviation D to be achieved
with the connection type
VT connection
=
3 ph-to-ph voltages
being:
[fo_ibs_prim_measur_volt_3, 1, en_US]
10.10.1.3
Functional Tests
10.10 Commissioning Hints for Voltage Control
SIPROTEC 5, High-Voltage Bay Controller, Manual
1079
C53000-G5040-C015-9, Edition 11.2017
Summary of Contents for 6MD85
Page 8: ...8 SIPROTEC 5 High Voltage Bay Controller Manual C53000 G5040 C015 9 Edition 11 2017 ...
Page 30: ...30 SIPROTEC 5 High Voltage Bay Controller Manual C53000 G5040 C015 9 Edition 11 2017 ...
Page 46: ...46 SIPROTEC 5 High Voltage Bay Controller Manual C53000 G5040 C015 9 Edition 11 2017 ...
Page 172: ...172 SIPROTEC 5 High Voltage Bay Controller Manual C53000 G5040 C015 9 Edition 11 2017 ...
Page 514: ...514 SIPROTEC 5 High Voltage Bay Controller Manual C53000 G5040 C015 9 Edition 11 2017 ...
Page 1056: ...1056 SIPROTEC 5 High Voltage Bay Controller Manual C53000 G5040 C015 9 Edition 11 2017 ...
Page 1092: ...1092 SIPROTEC 5 High Voltage Bay Controller Manual C53000 G5040 C015 9 Edition 11 2017 ...
Page 1204: ...1204 SIPROTEC 5 High Voltage Bay Controller Manual C53000 G5040 C015 9 Edition 11 2017 ...
Page 1238: ...1238 SIPROTEC 5 High Voltage Bay Controller Manual C53000 G5040 C015 9 Edition 11 2017 ...
Page 1252: ...1252 SIPROTEC 5 High Voltage Bay Controller Manual C53000 G5040 C015 9 Edition 11 2017 ...
Page 1256: ...1256 SIPROTEC 5 High Voltage Bay Controller Manual C53000 G5040 C015 9 Edition 11 2017 ...







































































