





























270
Basic Information
Section 6-1
Switching method and the behaviors are as shown below:
To stop axis (speed = 0) in speed control mode started by SPEED command,
execute the SPEEDR command (speed control cancel).
The waveform at this point (i.e. when stopping) will follow the speed change
rate specified in SPEEDR command.
Similarly, to stop axis (torque = 0) in torque control mode started by TORQUE
command, execute the TORQUER command (torque control cancel).
The waveform at this point (i.e. when stopping) will follow the torque change
rate specified in TORQUER command.
Note
As in the following cases, however, the operation is stopped (or started) with-
out executing SPEEDR or TORQUER command. Therefore, the speed
change rate or torque change rate specified in the previous SPEED or
TORQUE command is used.
• When an alarm occurred
• When a program ended
• When a program was interrupted
• When a program was restarted after interruption.
S-curve Filter & Stop
Mode/Pass Mode
Movement averaging filter is used for the S-curve acceleration/deceleration of
the MC Unit.
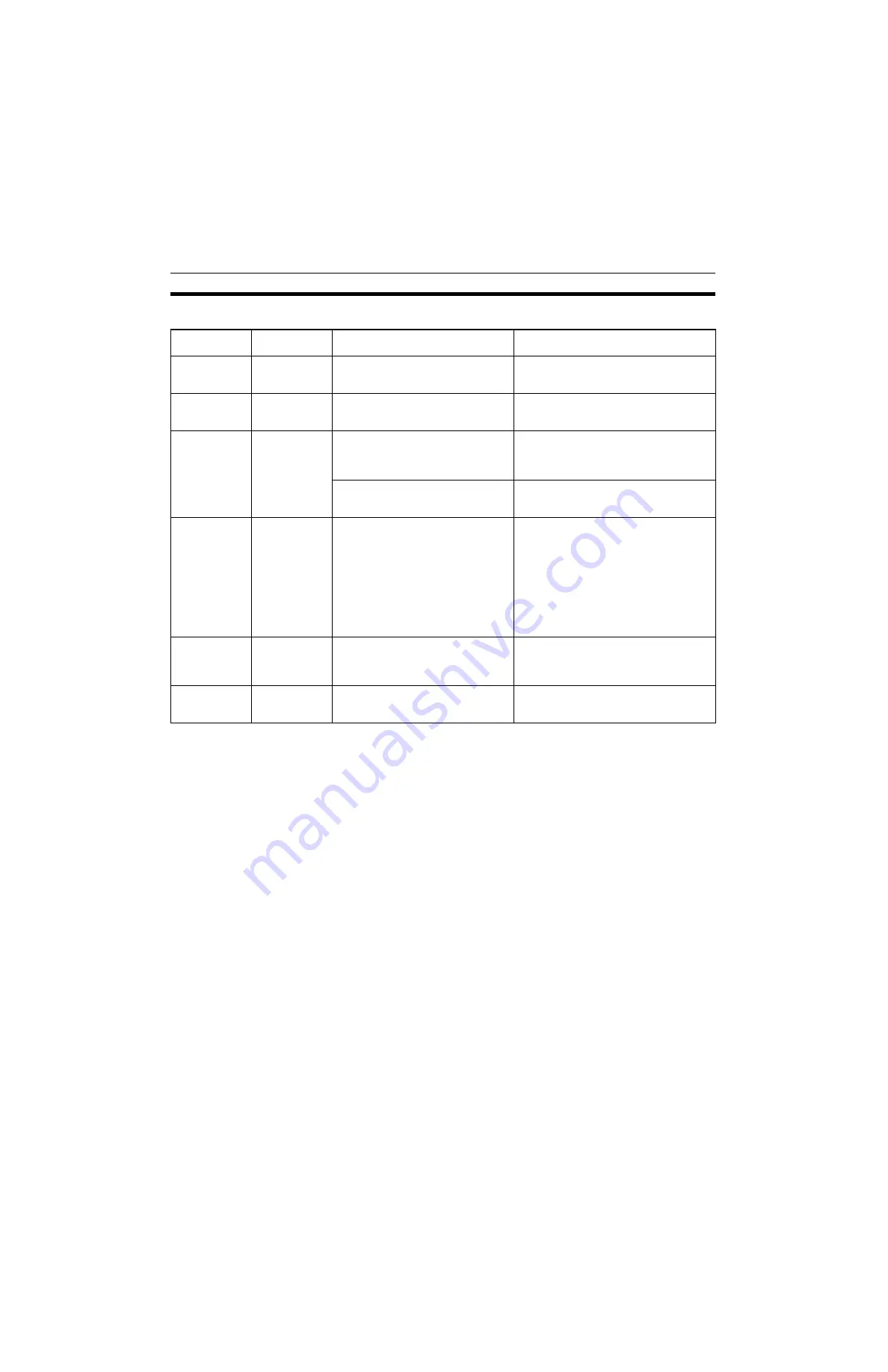
Mode before
switch
Mode after
switch
Switching method
Behavior
Position
Speed
• Execute SPEED command when the
axis is being stopped.
When executing SPEED command during
axis movement, the alarm [2014: Control
mode error] will occur.
Position
Torque
• Execute TORQUE command when
the axis is being stopped.
When executing TORQUE command during
axis movement, the alarm [2014: Control
mode error] will occur.
Speed
Position
• Execute a command for position con-
trol mode after SPEEDR command
was executed to switch to the position
control mode.
When executing a command for position
control mode without executing SPEEDR
command first, the alarm [2014: Control
mode error] will occur.
• Execute MOVE command.
When executing MOVE command without
executing SPEEDR command, the speed of
the operation changes smoothly.
Speed
Torque
• Execute TORQUE command after
SPEEDR command was executed to
switch to position control mode.
• Execute TORQUE command.
When executing TORQUE command with-
out executing SPEEDR command first, the
torque command 0 is used after the switch
because the torque command value in the
speed control mode is unknown.
To change torque smoothly, monitor the
torque in speed control mode, and execute
the block with torque command value that
was monitored in TORQUE command of 0
torque change rate.
Torque
Position
• Execute TORQUER command
When executing a command (MOVE, etc.)
for position control mode in torque control
mode, the alarm [2014: Control mode error]
will occur.
Torque
Speed
• Execute SPEED command after
TORQUER command was executed
to switch to position control mode.
When executing SPEED command in
torque control mode, the alarm [2014: Con-
trol mode error] will occur.
Содержание CS1W-MCH71 -
Страница 2: ...CS1W MCH71 CJ1W MCH71 Motion Control Unit Operation Manual Revised June 2008 ...
Страница 3: ...iv ...
Страница 29: ...xxx ...
Страница 33: ...xxxiv ...
Страница 35: ...xxxvi ...
Страница 39: ...xl ...
Страница 69: ...24 Performance Section 1 7 ...
Страница 99: ...54 Connecting MECHATROLINK Devices Section 3 5 ...
Страница 283: ...238 Saving Data Section 5 4 ...
Страница 417: ...372 Command Details Section 6 3 ...





















































