





























6
6.4
Input/output terminals of the control board
6-482
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
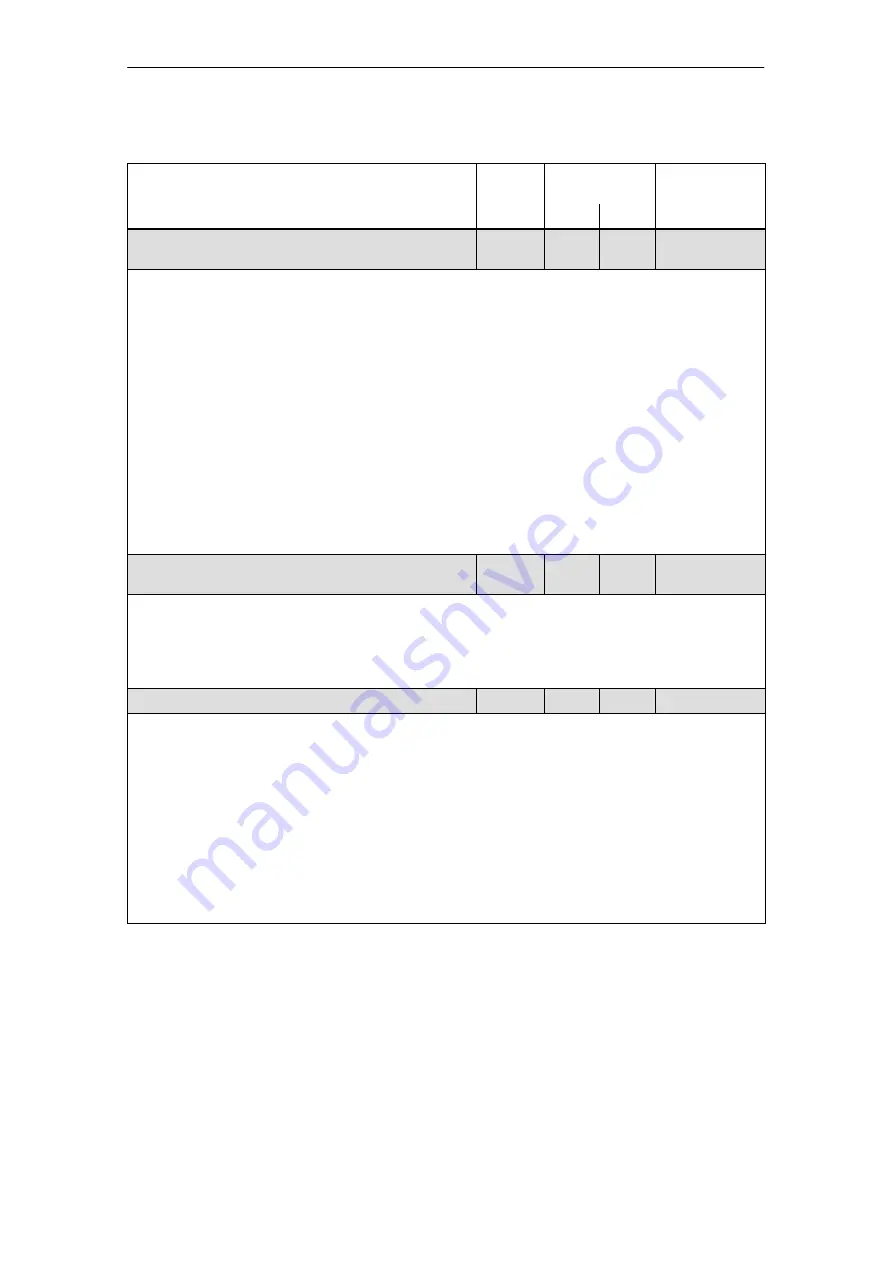
Table 6-45
List of input signals, continued
Operating
mode
Signal name, description
PROFIBUS bit
pos
n–set
Fct. No.
Operating condition/OFF 3
33 (from
SW 5.1)
x
x
STW1.2
1 signal
Operating condition
Prerequisite for the ”drive ready” status and ”ready to power–up”.
0 signal
OFF 3
Fast stop
The drive brakes along the torque limit/current limit without ramp–function generator. In
the open–loop torque controlled mode, this limit only corresponds to the torque setpoint
entered and not the maximum possible torque.
The gating pulses of the power transistors are cancelled (pulse inhibit) if one of the follow-
ing conditions is fulfilled:
– |n
act
| < n (P1403)
or
– the pulse cancellation timer stage (P1404) has expired
Note:
The characteristics at power–on again can be defined via P1012.12.
P1012.12 = 1
Power–on inhibit for alarm and OFF2/OFF3
= 0
No power–on inhibit
Enable inverter/pulse inhibit
34 (from
SW 4.1)
x
x
STW1.3
1 signal
Enable inverter
Pulse enable, ramp–up with the setpoint entered
0 signal
Pulse inhibit
The motor coasts down. In closed–loop speed controlled operation, the ”drive ready” state
remains set.
Ramp–function generator enable
35
x
–
STW1.4
This input signal has the following characteristics, dependent on the signal level:
1 signal
Ramp–function generator is enabled
Any speed setpoint can be entered.
This is the condition that the motor rotates.
1/0 signal
Ramp–function generator is not longer enabled
The drive brakes at the torque/current limit without ramp–function generator.
This is the fastest possible braking at the torque/current limit.
0 signal
The ramp–function generator output (speed setpoint) is set to 0.
Application:
The drive can be braked as quickly as possible using this signal, i.e. not along the ramp–function genera-
tor ramp, but at the torque limit.
6 Description of the Functions
01.99
! 611ue diff !
08.01
04.05







































































