





























6
6.4
Input/output terminals of the control board
6-507
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
Table 6-49
List of output signals, continued
Operating
mode
Signal name, description
PROFIBUS bit
pos
n–set
Fct. No.
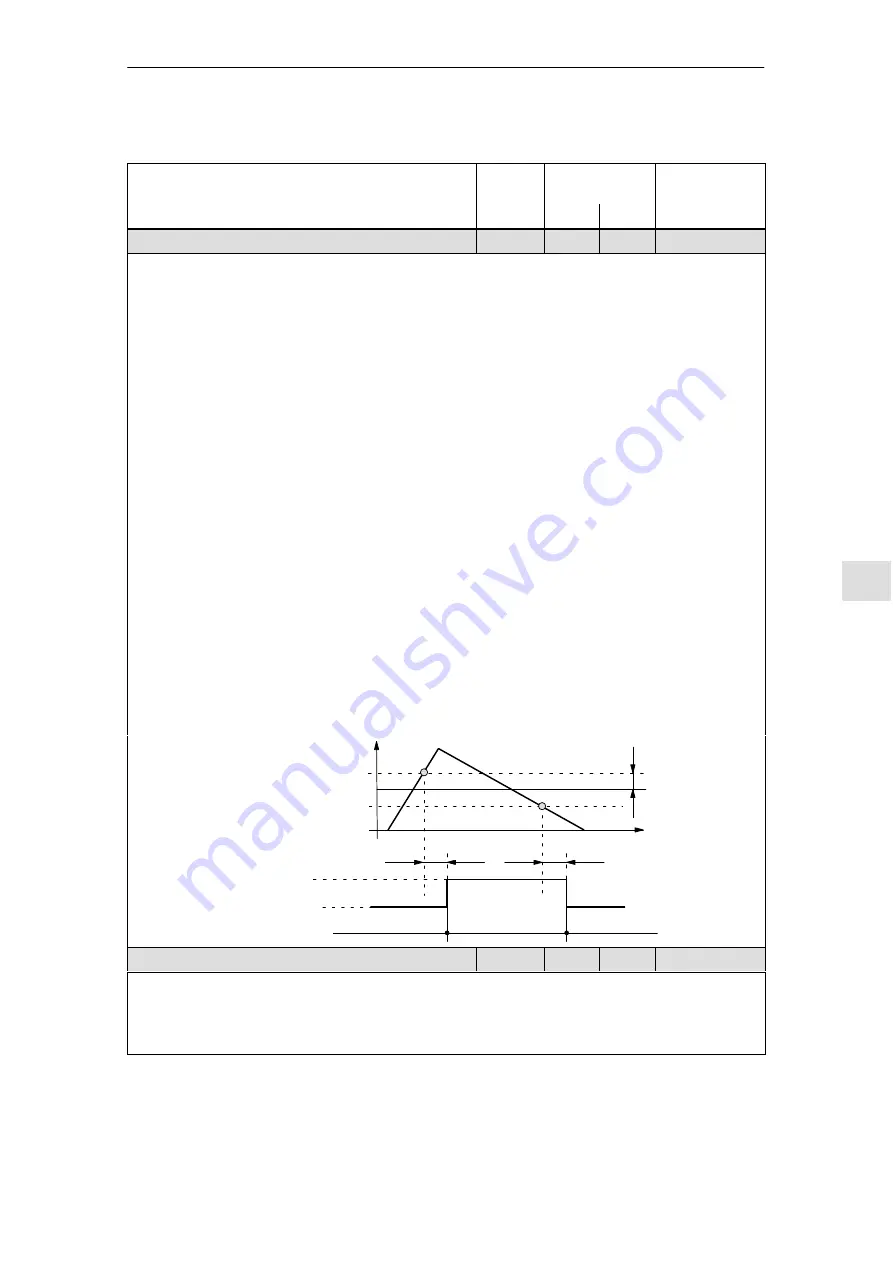
Variable message function
7
x
x
MeldW.5
This output signal indicates whether any selected internal quantity has been fallen below or exceeded a
selectable threshold value.
A hysteresis (P1624) can be specified for the threshold value and a time for the pull–in or drop–out delay
(P1625, P1626) can be specified for the signal output.
The quantity to be monitored can either be selected by entering a signal number (P1621) or by entering
an address (P1620.1 and P1622).
P1620.0
1: active
0: not active
P1620.1
1: address range Y
0: address range X
P1620.2
1: comparison with the sign
0: comparison without the sign
P1621
Signal number, variable signaling function
The signal number from the signal selection list for analog outputs must be entered here (refer
to Chapter 6.7 under Table 6-56).
If the signal number = 1 (physical address), then the address must be entered into P1620.1 of
the address range and in P1622, the address (this is only relevant for Siemens service activi-
ties).
P1622
Address, variable message function
P1623
Threshold, variable message function
P1624
Hysteresis, variable message function
Note:
The threshold and hysteresis are obtained from the signals specified in the normalization
P1621. The normalization is described in Chapter 6.7 under Table 6-56 and can be partially
read–out of parameters.
P1625
Pull–in delay variable message function
P1626
Drop–out delay variable message function
t
Fallen below
Exceeded
Threshold, P1623
1 signal
P1624
0 signal
Fallen below
P1625
P1626
Variable signaling function
Open–loop torque controlled mode
–
x
–
ZSW1.14
This output signal is used to signal whether closed–loop speed controlled or open–loop torque controlled
operation has been selected (STW1.14).
1 signal
Open–loop torque controlled operation (M
set
mode)
0 signal
Closed–loop speed controlled operation (n
set
mode)
6 Description of the Functions
01.99
! 611ue diff !
08.01
07.03







































































