





























6
6.3
Axis couplings (from SW 3.3)
6-459
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
6.3.2
Handling faults in the master and slave drives
Overview
If a coupling is active, the master drive must be able to respond to
slave drive faults.
It must also be guaranteed that the slave drive is reliably stopped, if the
master drive develops a fault.
Dependent on the stop responses, the following should be observed for
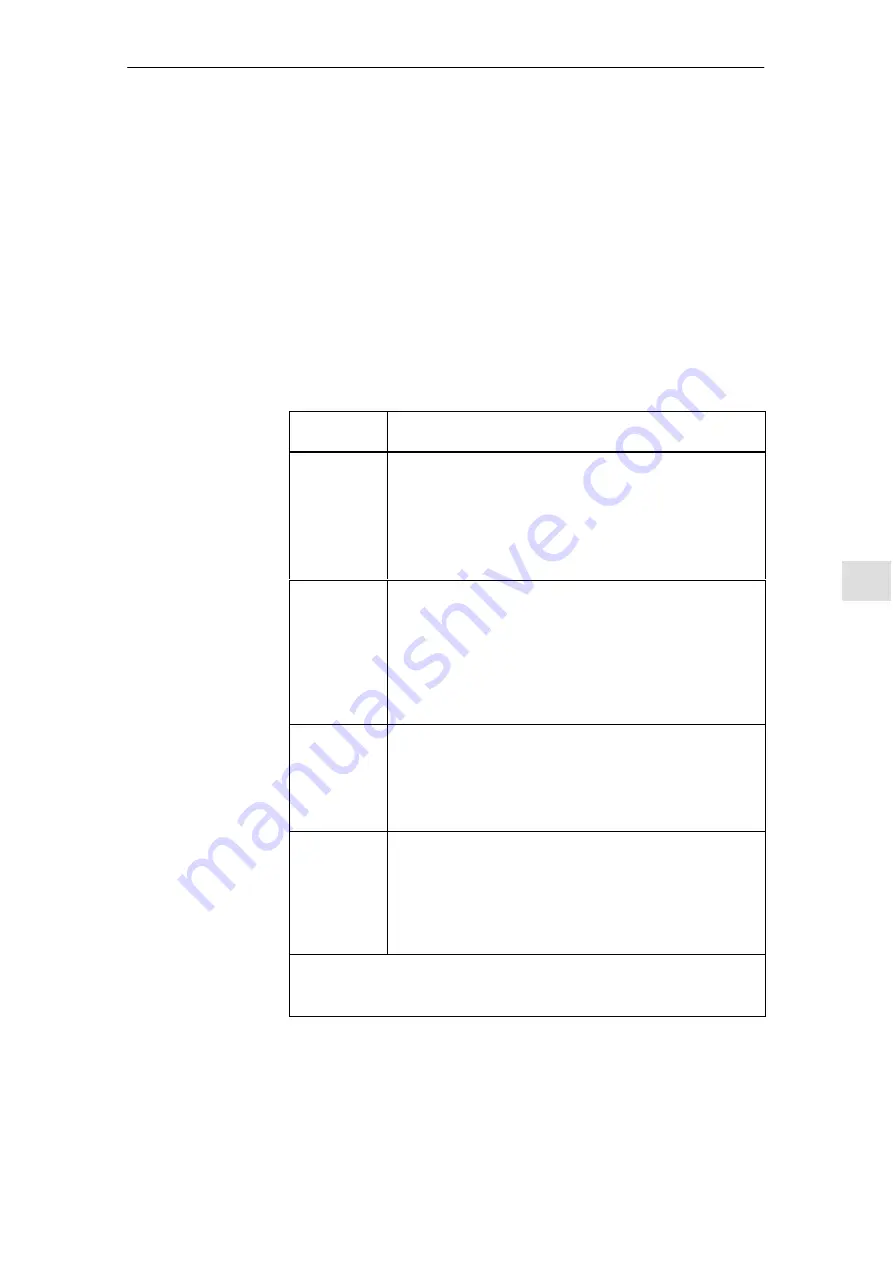
faults and warnings in the slave drive:
Table 6-41
Behavior when faults develop in the slave drive
Fault situa-
tions
What happens when these fault situations occur?
Faults with
stop response
STOP I
STOP II
STOP III
The coupling is disconnected (switched–out)
The slave drive is appropriately braked
Output signals
–
Status, controller enable = 0
–
Fault present
= 1
–
Warning present
= 0
Faults with
stop response
STOP IV
STOP V
STOP VI
Block processing is interrupted
The slave drive remains closed–loop controlled and
coupled
Output signals
–
Status, controller enable = 1
–
Fault present
= 1
–
Warning present
= 0
Warnings with
stop response
STOP VII
No response for the slave drive
Output signals
–
Status, controller enable = 1
–
Fault present
= 0
–
Warning present
= 1
Controller
enable with-
drawn
When the controller enable is withdrawn, this does not
have to result in faults being output
Output signals
–
Status, controller enable = 0
–
Fault present
= 0
–
Warning present
= 0
Note:
The required stop response can be initiated for a group of axes by appropri-
ately externally evaluating the output signals of the slave drive.
Faults in the slave
drive
6 Description of the Functions
01.99
08.01







































































