





























6
6.2
Positioning mode (P0700 = 3, from SW 2.1)
6-403
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
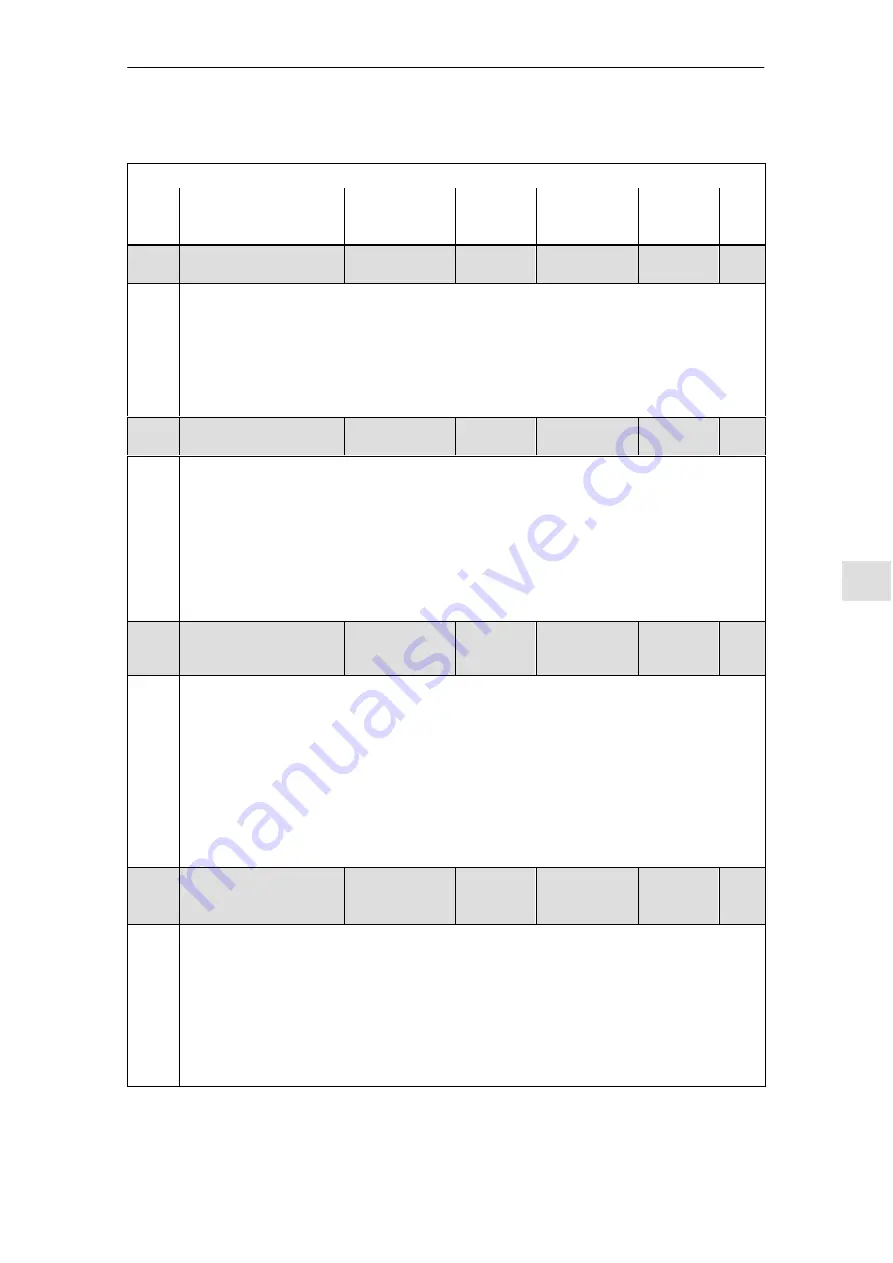
Table 6-35
Parameter overview when referencing/adjusting, continued
Parameters
No.
Ef-
fec-
tive
Units
Max.
Standard
Min.
Name
0171
Max. distance
up to the zero pulse
0
20 000
200 000 000
MSR
PrgE
... specifies the maximum distance the axis can move when leaving the reference cam or from
the start in order to find the zero pulse.
Note:
If a fault condition occurs, the axis remains stationary and fault 162 is signaled (no reference
zero pulse available).
If P0171 is entered and it is insignificantly higher than P0172, a fault can occur due to a de-
gree of uncertainty when determining the actual value travel.
0172
Distance up to the zero
pulse
–
–
–
MSR
RO
The distance between leaving the reference cam or from the start and reaching the zero pulse is
entered in this parameter.
Note:
This parameter helps to adjust the reference cam during start–up.
There is some uncertainty in the actual distance between the reference cam and reference
zero pulse. This is caused by the switching behavior (timing) of the reference cam switch and
the sampling of the reference cam switching signals in the interpolation clock cycle.
The measured distance in P0172 can therefore be different at each reference point ap-
proach.
0173
Reference point ap-
proach without
reference cams
0
0
1
–
PrgE
... identifies the type of axes, which do not require reference cams for referencing. These are the
following axes:
Axes that have only one zero mark over the complete traversing range
Rotary axes that only have one zero mark per revolution
1
No reference cam available
For these axes, the reference point approach starts with phase 2 (synchronization
with the reference zero pulse).
The approach direction is defined using P0166 (reference cam approach direction).
0
Reference cams available
For these axes, the reference point approach starts with phase 1 (travel to the refer-
ence cams).
0174
Referencing mode –
position measuring
system
1
1
2
–
Im-
medi-
ately
The parameter defines the referencing mode.
1
Incremental measuring system available
The zero pulse on the encoder track is evaluated.
2
There is an incremental measuring system with equivalent zero mark
Instead of the zero mark from the encoder, an ”equivalent zero mark” (e.g. a BERO
pulse) is expected at the input terminal I0.x.
Note:
The equivalent zero mark is identified, depending on the direction
(refer under the index entry ”Input signal – equivalent zero mark”).
6 Description of the Functions
01.99
! not 611ue !
04.05







































































