





























6
6.2
Positioning mode (P0700 = 3, from SW 2.1)
6-418
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
Table 6-38
Parameters used to program traversing blocks, continued
No.
Effective
Units
Max.
Standard
Min.
Name
0087:64
xXxx
Block change enable CONTINUE WITH STOP
This block change enable has the following properties
(corresponds to ”precise stop G60” acc. to DIN 66025):
The position programmed in the block is precisely approached
The axis braked until the positioning window is reached (P0321)
For P0321=0 or if the following error is less than P0321, the block change is executed as
soon as the interpolator has reached its position reference value.
The block is changed when the positioning window is reached.
Blk
Pos.
Vel.
Command
Pos. mode
Block change enable
0
10
100
POSITIONING
ABSOLUTE
CONTINUE WITH STOP
1
30
150
POSITIONING
RELATIVE
CONTINUE WITH STOP
2
10
50
POSITIONING
RELATIVE
END
100
v
t
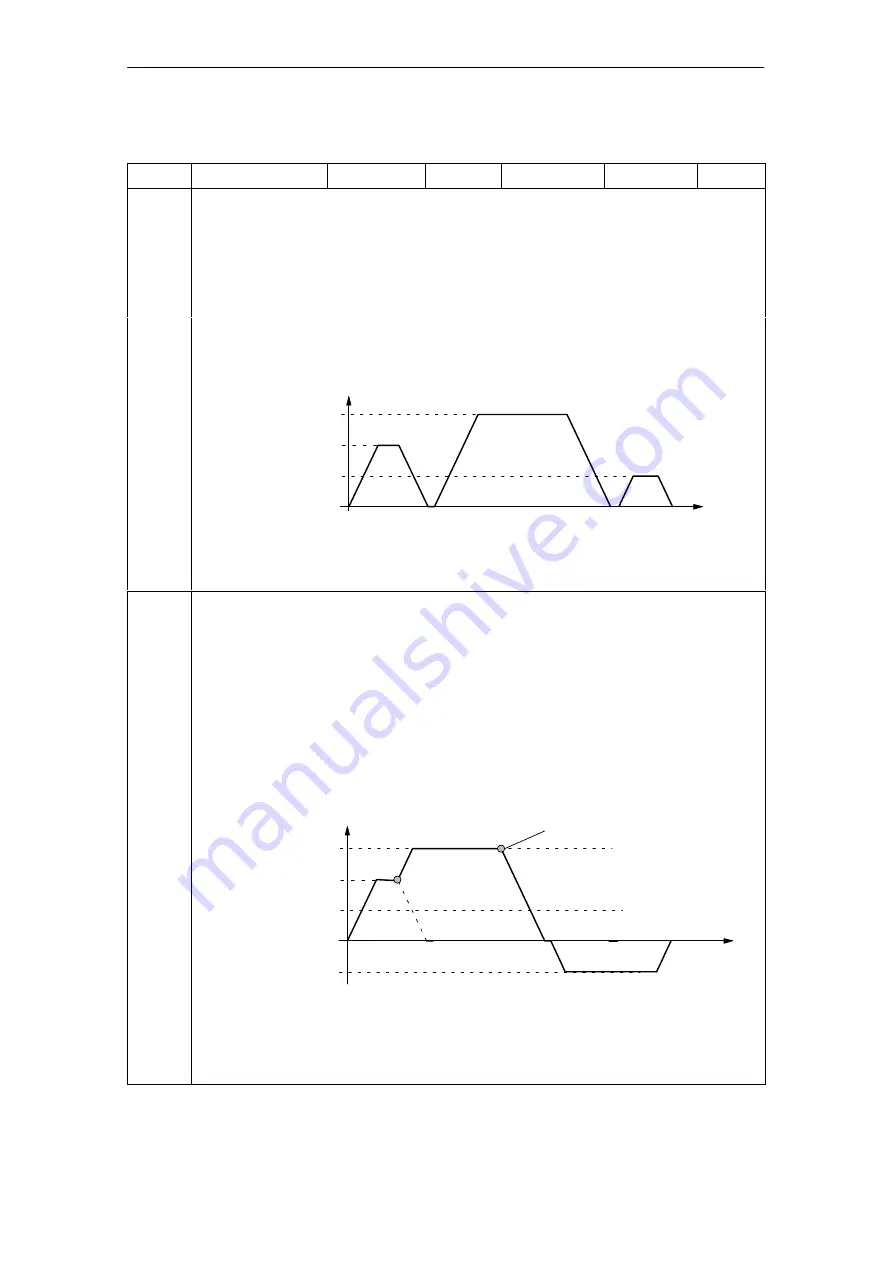
Example:
Programming
3 traversing blocks
150
Note:
For an existing axis coupling (position coupling), the positioning window is not effective for
CONTINUE WITH STOP. If this represents a problem in an application when the master drive
is stationary, then the PLC would first have to release the coupling and then position the slave
drive normally.
0087:64
xXxx
Block change enable CONTINUE FLYING
This block change enable has the following properties
(corresponds to ”precise stop G64” acc. to DIN 66025):
The following block is immediately processed when the time to apply the brake is reached
For a direction change, the axis brakes down to standstill and waits until the position actual
value has reached the positioning window (this corresponds to the block change enable
”continue with stop”
If the deceleration override (P0084:64) between the actual block and the block to be
changed into on the fly differ, then the flying block change is automatically prevented and
instead of this, the CONTINUE WITH STOP block change executed
Blk
Pos.
Vel.
Command
Pos. mode
Block change enable
0
10
100
POSITIONING
ABSOLUTE
CONTINUE FLYING
1
30
150
POSITIONING
ABSOLUTE
CONTINUE FLYING
2
10
50
POSITIONING
ABSOLUTE
END
100
v
t
Example:
Programming
3 traversing blocks
150
–50
Brake application point
There is a direction of reversal between block 1 and block 2. This is the reason that at the
braking instant, the drive brakes from block 1 down to standstill and waits until the position
actual value reaches the positioning window. After this, block 2 is executed.
Note:
For traversing blocks whose distance is able to be travelled through within an IPO clock cycle,
then the drive brakes briefly.
6 Description of the Functions
01.99
! not 611ue !
10.04







































































