





























6
6.2
Positioning mode (P0700 = 3, from SW 2.1)
6-381
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
The position actual value and the position reference value can be adap-
ted using these parameters.
The direction adaptation should be made as follows:
1. The position control sense is not correct?
Effect:
A fault is immediately signaled when moving the axis (e.g.:
131 (following error too high) or 135
(standstill monitoring has responded).
Remedy:
Invert the position actual value in P0231; POWER ON and check
the control sense.
2. The direction of motion is not correct?
Effect:
The axis does not move in the required direction.
Remedy:
Invert the position reference value in P0232; POWER ON, and
check the direction of motion.
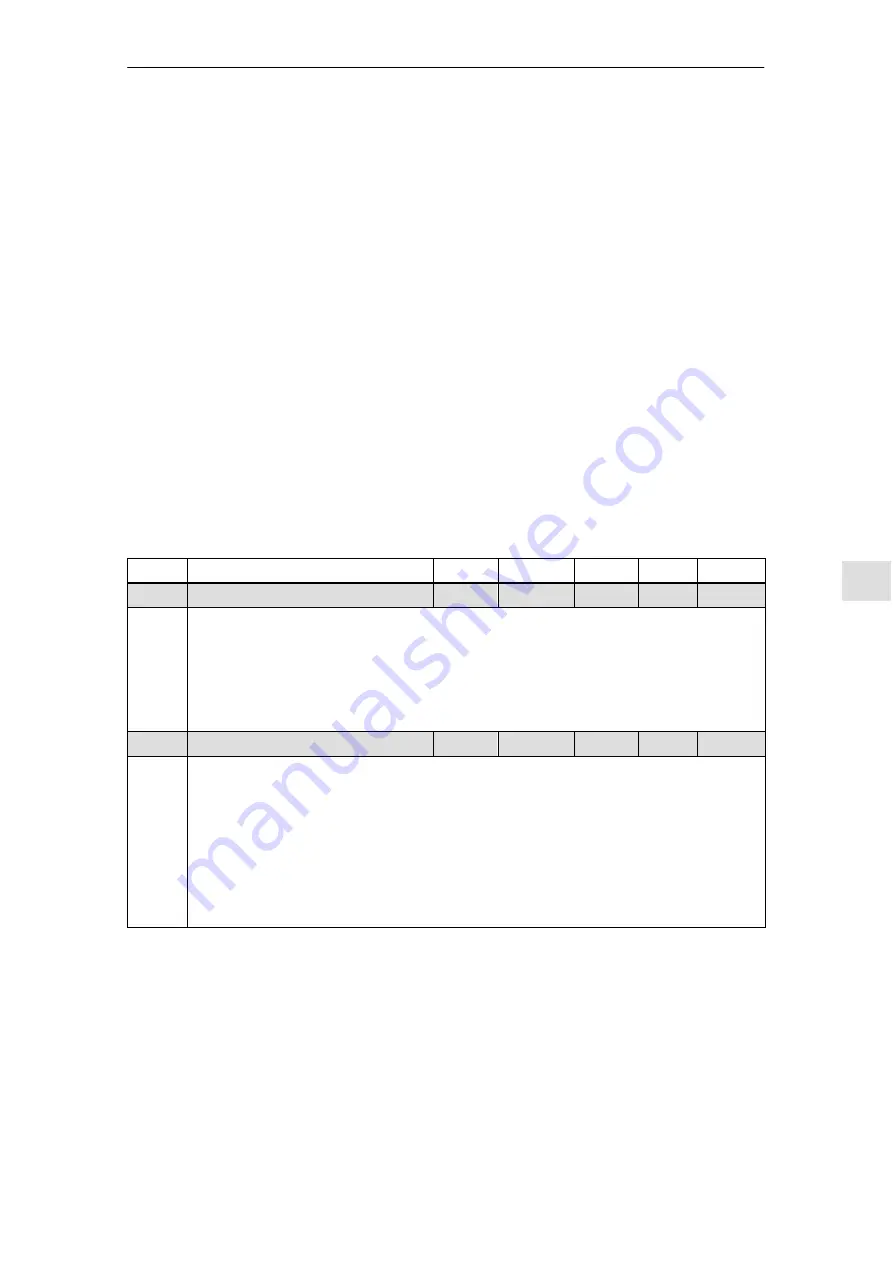
Table 6-26
Parameters for direction adaptation
No.
Name
Min.
Standard
Max.
Units
Effective
0231
Position actual value inversion
0
0
1
–
PO
... the control sense of the position controller is established.
= 1
Position actual value inversion
= 0
No position actual value inversion
Note:
If the control sense of the position controller is not correct, then the position actual value must
be inverted. The direction of motion is set using P0232.
0232
Position reference value inversion
0
0
1
–
PO
... the required motion direction is selected.
= 1
Position reference value inversion
Positive motor speed ––> the position is decreased (negative position count direc-
tion)
= 0
No position reference value inversion
Positive motor speed ––> the position is increased (positive position count direction)
Note:
The position controller control sense is not influenced, i.e. it is internally taken into consider-
ation.
Direction
adaptation
P0231
P0232
6 Description of the Functions
01.99
! not 611ue !







































































