





























7
7.1
Overview of faults and warnings
7-622
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
In the list of faults and warnings, for each fault and warning, the stop
response and its effects are specified under ”stop response”.
––> Refer to Chapter 7.3
Note
Handling faults in the master and slave drive for coupled axes, refer to
Chapter 6.3.2.
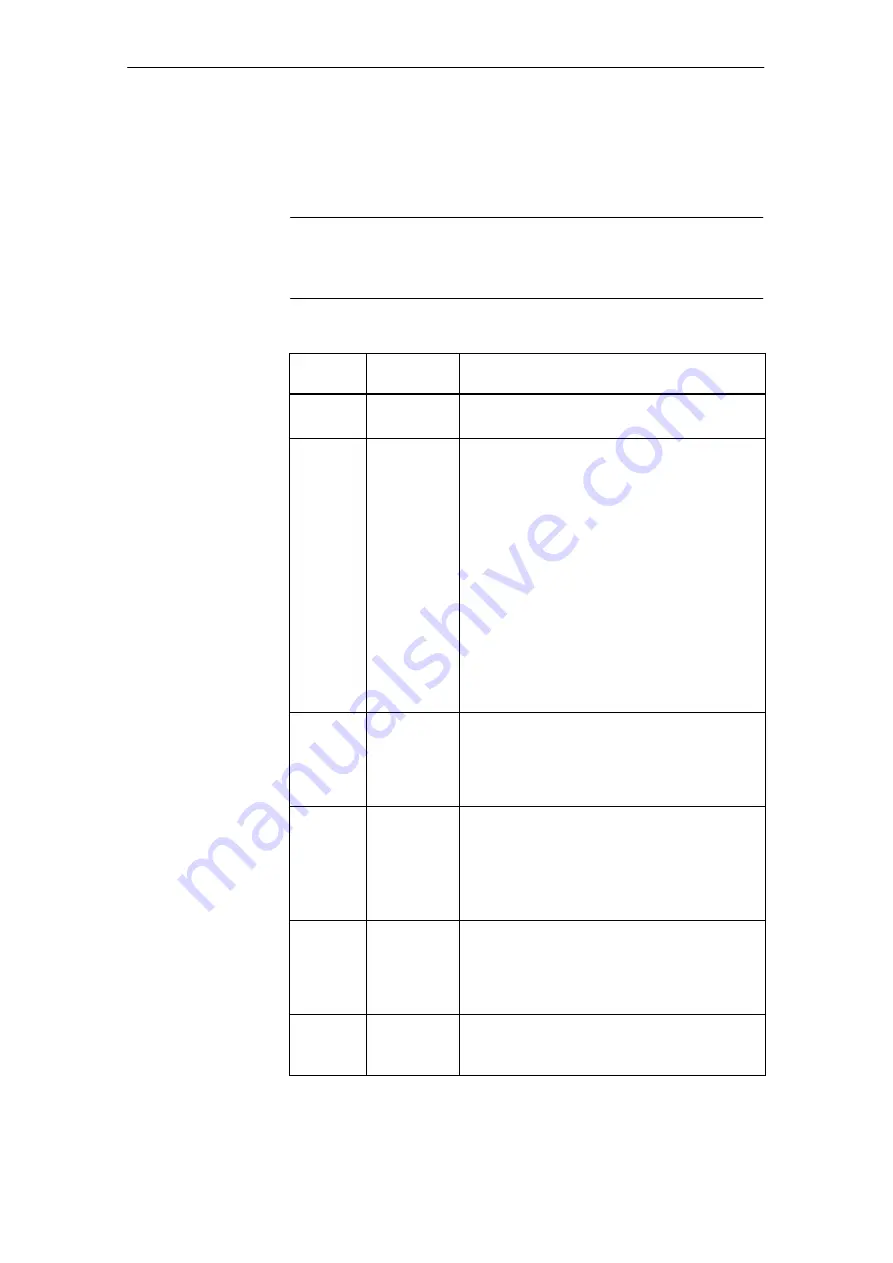
Table 7-2
Stop responses and their effect
Stop
response
Stopping
via...
Effect
STOP I
Internal
pulse inhibit
Immediate pulse cancellation.
The drive ”coasts down”.
STOP II
Internal
control inhibit
Closed–loop speed controlled operation
–
By immediately entering n
set
= 0 the drive
is braked along the down ramp.
–
If the speed actual value falls below the
value in P1403 (shutdown speed, pulse
cancellation), or if the time in P1404 (timer
stage, pulse cancellation) has expired,
then the pulses are canceled.
Torque control mode
–
The drive does not actively brake.
–
If the speed actual value falls below the
value in P1403 (shutdown speed, pulse
cancellation), or if the time in P1404 (timer
stage, pulse cancellation) has expired,
then the pulses are canceled.
STOP III
n
set
= 0
The axis is braked, closed–loop speed con-
trolled with the maximum deceleration
(P0104).
The drive remains in the closed–loop con-
trolled mode.
STOP IV
Interpolator
(P0104)
The axis is braked closed–loop position con-
trolled with the maximum deceleration
(P0104).
The drive remains in the closed–loop con-
trolled mode.
The axes remain coupled.
STOP V
Interpolator
(P0104
P0084:64)
The axis is braked closed–loop position con-
trolled using the programmed deceleration
(P0104
deceleration override in P0084:64).
The drive remains in the closed–loop con-
trolled mode.
STOP VI
End of block
Standstill after the end of a block.
The drive remains in the closed–loop con-
trolled mode.
Stop responses
7 Fault Handling/Diagnostics
01.99
08.02







































































