





























6
6.2
Positioning mode (P0700 = 3, from SW 2.1)
6-401
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
6.2.8
Parameter overview for referencing/adjustments
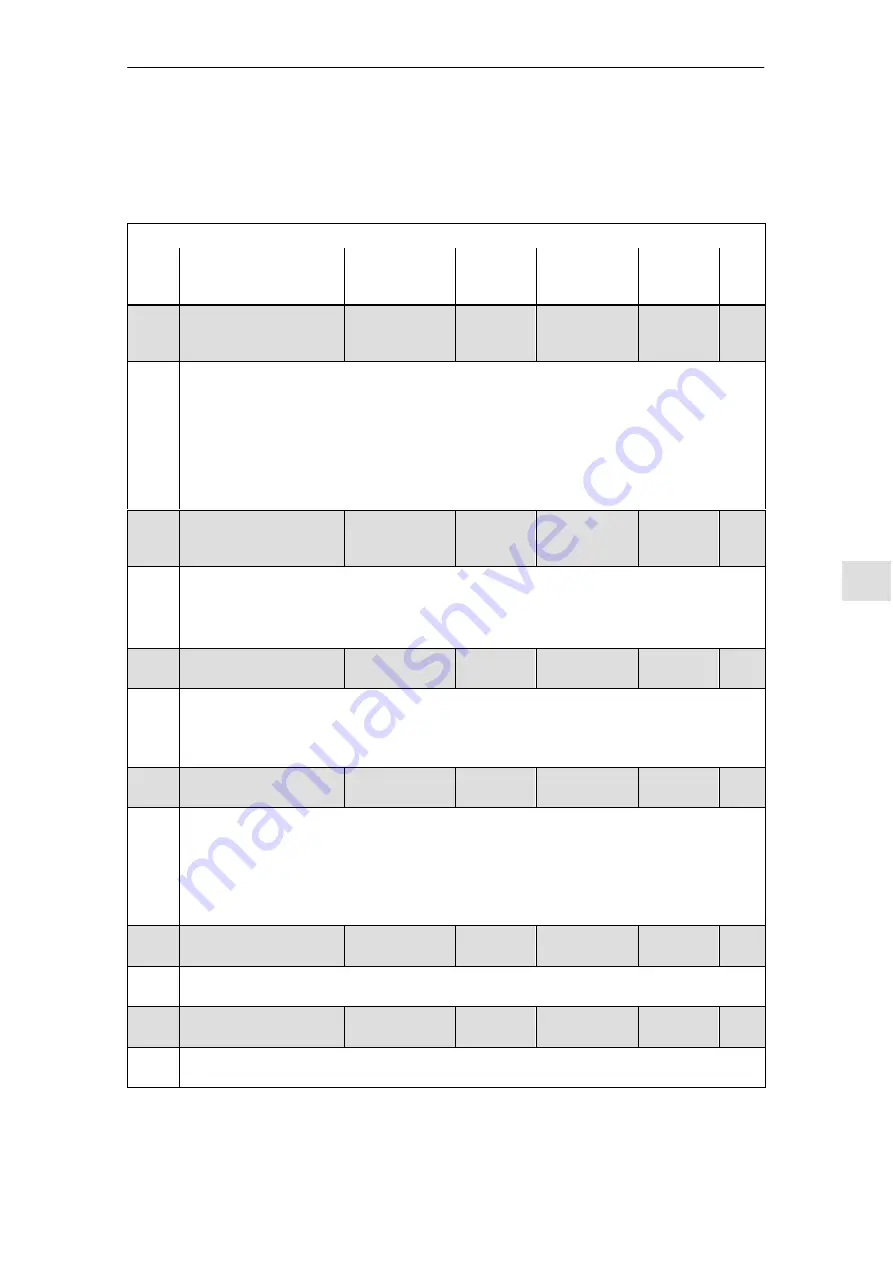
Table 6-35
Parameter overview when referencing/adjusting
Parameters
No.
Name
Min.
Standard
Max.
Units
Ef-
fec-
tive
0160
Reference point
coordinate
–200 000 000
0
200 000 000
MSR
Im-
medi-
ately
The parameter defines the position value which is set, as actual axis position, after referencing
or adjusting.
Incremental measuring system
After the reference point has been reached, the drive accepts the position value in this pa-
rameter as the current axis position.
Absolute value encoders
When adjusting the encoder, the position value in this parameter is set as the actual axis
position. The difference to the actual encoder actual value is entered into P0162.
0161
Stopping at marks
(from SW 8.3)
0
0
1
–
Im-
medi-
ately
...defines the behavior when stopping at marks.
0
Reference point approach is not interrupted at marks (standard)
1
Reference point approach remains stationary, if the first zero mark or, for distance–coded
measuring systems, the second zero mark was found.
0162
Reference point
offset
–200 000 000
–2 000
200 000 000
MSR
PrgE
Incremental measuring system
After the reference zero pulse has been identified, the axis is moved through this distance.
The axis has reached the reference point of this position, and accepts the reference point
coordinate (P0160) as new actual value.
0163
Reference point
approach velocity
1 000
5 000 000
2 000 000 000
c*MSR/min
PrgE
The axis moves with this velocity towards the reference cam after the reference point approach
has been started.
The velocity must be set, so that after the reference cam has been reached, and braking, the
following conditions must be fulfilled:
The axis must come to a standstill at the reference cam
It is not permissible that the hardware limit switch is reached when braking
0164
Reference point
shutdown velocity
1 000
300 000
2 000 000 000
c*MSR/min
PrgE
The axis moves with this velocity between identifying the reference cam and synchronizing with
the first zero pulse (reference zero pulse).
0165
Reference point
entry velocity
1 000
300 000
2 000 000 000
c*MSR/min
PrgE
The axis traverses with this velocity between synchronizing with the first zero pulse (reference
zero pulse) and reaching the reference point.
6 Description of the Functions
01.99
! not 611ue !
04.05







































































