





























6
6.2
Positioning mode (P0700 = 3, from SW 2.1)
6-379
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
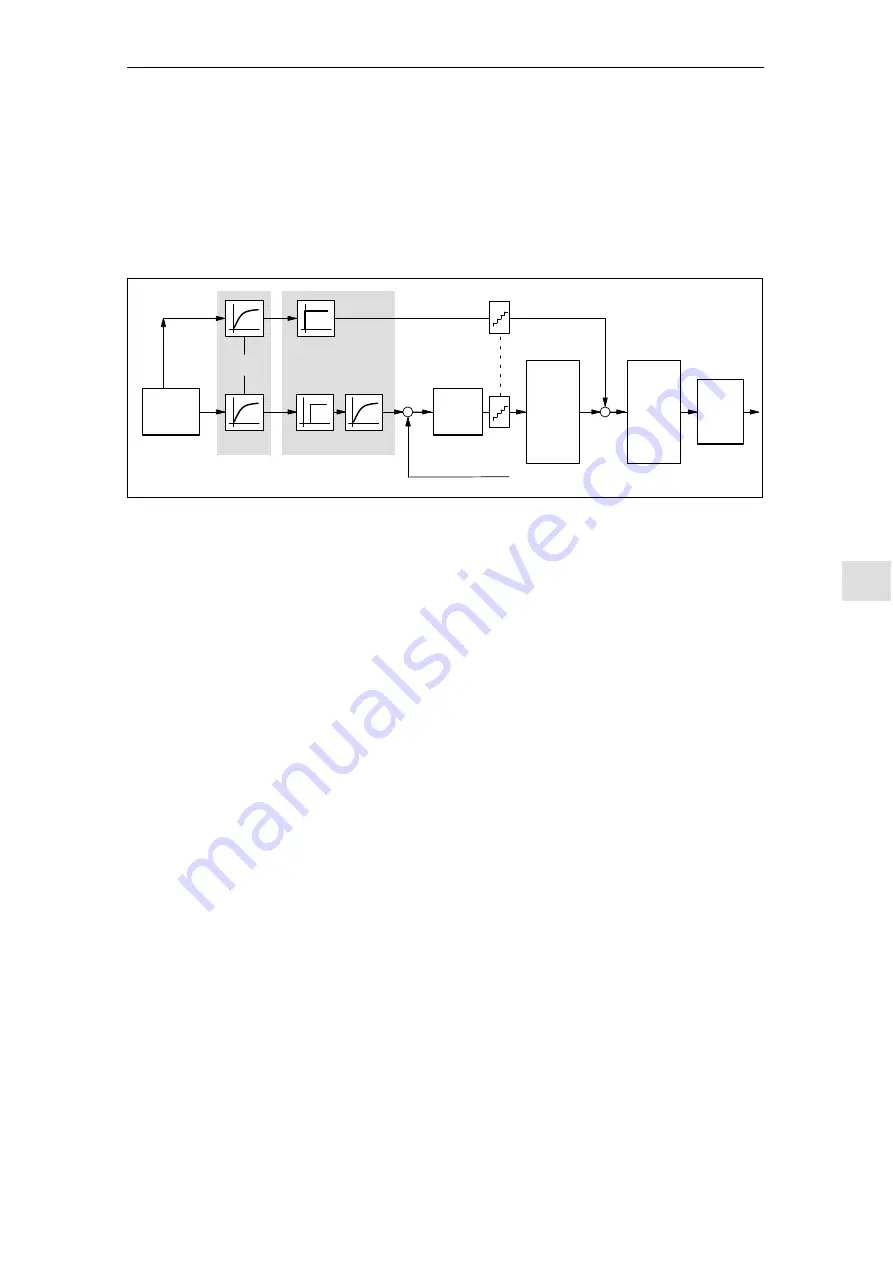
For speed pre–control, in addition a speed/velocity setpoint can be di-
rectly entered at the speed controller input. This additional setpoint can
be weighed with a factor.
The speed pre–control improves the control characteristics of the posi-
tion control loop in so much that for a constant velocity, the following
error is almost completely reduced, i.e. to almost zero.
+
P0204:8
P0205:8 P0206:8
n
set
pre–control
Pre–control
(activated/de–activated
with P0203)
–
Speed
control-
ler
Pos.
cntrller
2nd
speed
set–
point
filter
1st
speed
set–
point
filter
Inter–
polator
x
act
x
set
P0210:8
Clock cycle adaptation
P1012.8
Fig. 6-15 Speed pre–control
The following prerequisites must be fulfilled to set the speed pre–con-
trol:
The current, speed and position control loop must be optimized.
After that, the speed pre–control can be set as follows:
1. Set P0203 = 1 ––> this activates speed pre–control
2. Set P0204:8 to 100 % (this is the standard value)
3. P0206:8 = Set the approximate value from the sum of
P1502:8 (time constant, speed setpoint filter 1) and
P1503:8 (time constant, speed setpoint filter 2)
4. P0205:8 = determine the value
Setting goal is: Positioning without undershoot or overshoot
Recommendation:
Traverse the axis using the traversing blocks, and evaluate position-
ing by plotting the position actual value using the trace function (re-
fer to Chapter 7.4.2).
With the trace function, the approach characteristics of the axis can
be zoomed in using the appropriate scaling and then evaluated.
Speed
pre–control
P0203
P0204:8
P0205:8
P0206:8
Setting the speed
pre–control
6 Description of the Functions
01.99
! not 611ue !







































































