





























Rev. 1.0, 02/00, page 674 of 1141
26.11.6
Filter Characteristics
•
Lag-Lead Filter
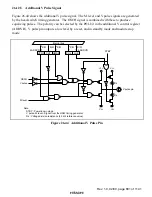
A filter required for a servo loop is built in the hardware. This filter uses IIR (infinite impulse
response) type digital filter (another type of the digital filter is FIR, i.e. finite impulse response
type). This digital filter circuit implements a lag-lead filter, as shown in figure 26.40.
R1
R2
C
+
INPUT
OUTPUT
Figure 26.40 Lag-Lead Filter
The transfer function is expressed by the following equation:
S
1+
2
π
f
2
Transfer function G (S)
=
S
1+
2
π
f
1
f
1
=1/2
π
C (R1+ R2)
f
2
=1/2
π
CR2







































































