





























Rev. 1.0, 02/00, page 306 of 1141
underflowing works to set to CFG mask F/F (masking movement) and the reload timer will be
cleared by the CFG.
•
When the acceleration has been finished (when the CFG signal is input before the prescribed
time has elapsed = reloading movement has been made before the down counter underflows),
an interrupt request will be issued because of the CFG.
When making breaking:
•
Set the AC/BR bit of the TMRM1 to braking (clear to 0). Also, use the rising edge of the CFG
as the reloading signal.
•
Set the prescribed time on the CFG frequency to determine if the braking has been finished,
into the reloading register.
•
The TMRU-2 will work to down-count the reloading data.
•
If the braking has not finished (when the CFG signal is input before the prescribed time has
elapsed and reloading movement has been made before the down counter underflows), the
reload timer movement will continue.
•
When the acceleration has finished (when the CFG signal is not input even when the
prescribed time has elapsed and underflowing of down-counting has occurred), interrupt
request will be issued because of the underflowing signal.
The acceleration and braking processes should be employed when making special reproductions,
in combination with the slow tracking mono-multi function outlined in section 15.3.7.
For register settings, see section 15.5.4, Acceleration and Braking Processes of the Capstan Motor.
15.3.7
Slow Tracking Mono-Multi Function
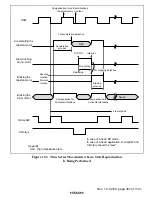
When performing slow reproductions or still reproductions, the braking timing for the capstan
motor is determined by use of the edge of the DVCTL signal. The slow tracking mono-multi
function works to measure the time from the rising edge of the DVCTL signal down to the desired
point to issue the interrupt request. In actual programming, this interrupt should be used to
activate the brake of the capstan motor. The TMRU-3 should be used to perform time
measurements for the slow tracking mono-multi function. Also, the braking process can be made
using the TMRU-2. Figure 15.2 shows the time series movements when a slow reproduction is
being performed.
For register settings, see section 15.5.3, Slow Tracking Mono-Multi Function.







































































