





























467
Overview
Section 9-1
Origin Search in
Automatic/Manual Mode
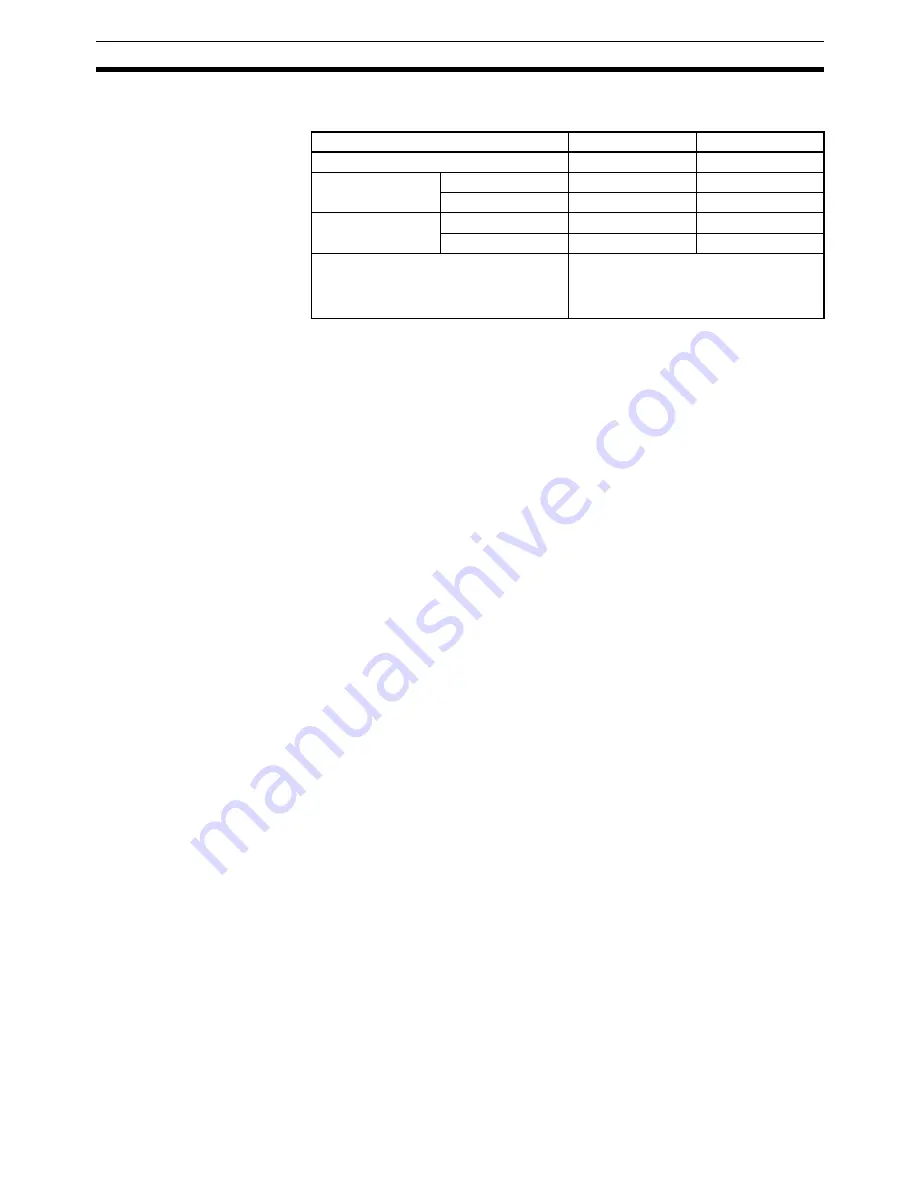
Determine the search method according to the mode of each task, as shown
below.
9-1-2
Using Absolute Encoders
The absolute encoder retains absolute data by using the backup battery when
the MC Unit or Servo Driver is turned OFF. When the MC Unit is turned ON
again, if the system is set to the servo-lock state, absolute data will be read
from the absolute encoder to determine the present position. No origin search
is required. The absolute encoder setup procedure is briefly described below.
Refer to
9-2 Input Signals Required for an Origin Search
to
9-4 Origin Search
Operations
for details.
Absolute Encoder Setup
Absolute encoder data must be reset and the absolute origin must be set at
the MC Unit in the following cases.
• When a Servomotor incorporating an absolute encoder is connected for
the first time or replaced.
• When the battery is replaced.
• When the retained absolute data is lost because the encoder cable is
removed for a long time.
Use the following procedure to set up the absolute encoder.
1,2,3...
1.
Connect the motor to the machine.
2.
Referring to the Servo Driver operation manual
,
connect a new battery.
3.
Referring to the Servo Driver operation manual
,
set the retained absolute
data to zero. At this point, the origin data of the absolute encoder is differ-
ent from the origin of the machine.
4.
Execute servo-lock with the MC Unit. The present value of the absolute en-
coder is read by the MC Unit.
5.
Perform an origin search to move the Servomotor to the origin.
6.
Turn the absolute encoder OFF and ON in order to save the present value
as the origin. The absolute encoder value corresponding to the workpiece
origin is set as absolute data.
With servo-lock in effect, the present value is automatically set to the read
value less the absolute origin set value. Therefore, no origin search is
required. Refer to
9-6 Setting the Origin With an Absolute Encoder
.
!Caution
When using an absolute encoder with a G-series Servo Driver, stop the axis
before locking the servo. Position error will occur if the servo is locked while
the axis is moving.
Method
Manual Mode
Automatic Mode
Forced Origin Bit
❍
---
Present Position
Preset
IOWR instruction
❍
---
G54
---
❍
Origin Search
Origin Search Bit
❍
---
G28
---
❍
Teaching Box
Possible in Teaching Box Enabled Mode
or in Teaching Box Priority Mode regard-
less of whether the MC Unit is in Manual
or Automatic Mode.
Summary of Contents for CS1W-MC221 -
Page 1: ...Motion Control Units Cat No W359 E1 04 CS1W MC221 V1 421 V1 OPERATION MANUAL ...
Page 2: ...CS1W MC221 V1 421 V1 Motion Control Units Operation Manual Revised February 2008 ...
Page 3: ...iv ...
Page 5: ...vi ...
Page 11: ...xii ...
Page 15: ...xvi ...
Page 19: ...xx ...
Page 27: ...xxviii Conformance to EC Directives 6 ...
Page 133: ...106 Installation Section 2 2 2 2 4 Dimensions CS1W MC421 CS1W MC221 ...
Page 173: ...146 Connecting Peripheral Devices Section 2 7 ...
Page 227: ...200 Command Area Section 3 6 ...
Page 351: ...324 Interface Specifics Section 5 4 ...
Page 513: ...486 Absolute Encoder Interface Specifications Section 9 7 ...
Page 575: ...548 Error Log Section 12 6 ...
Page 589: ...562 Performance Appendix A ...
Page 655: ...628 Control Bit Flag Timing Charts Appendix E ...
Page 683: ...656 Origin Search Patterns Appendix F ...
Page 685: ...658 Encoder Divider Rate and Rotation Speed for OMRON Servo Drivers Appendix G ...







































































