





























317
Interface Specifics
Section 5-4
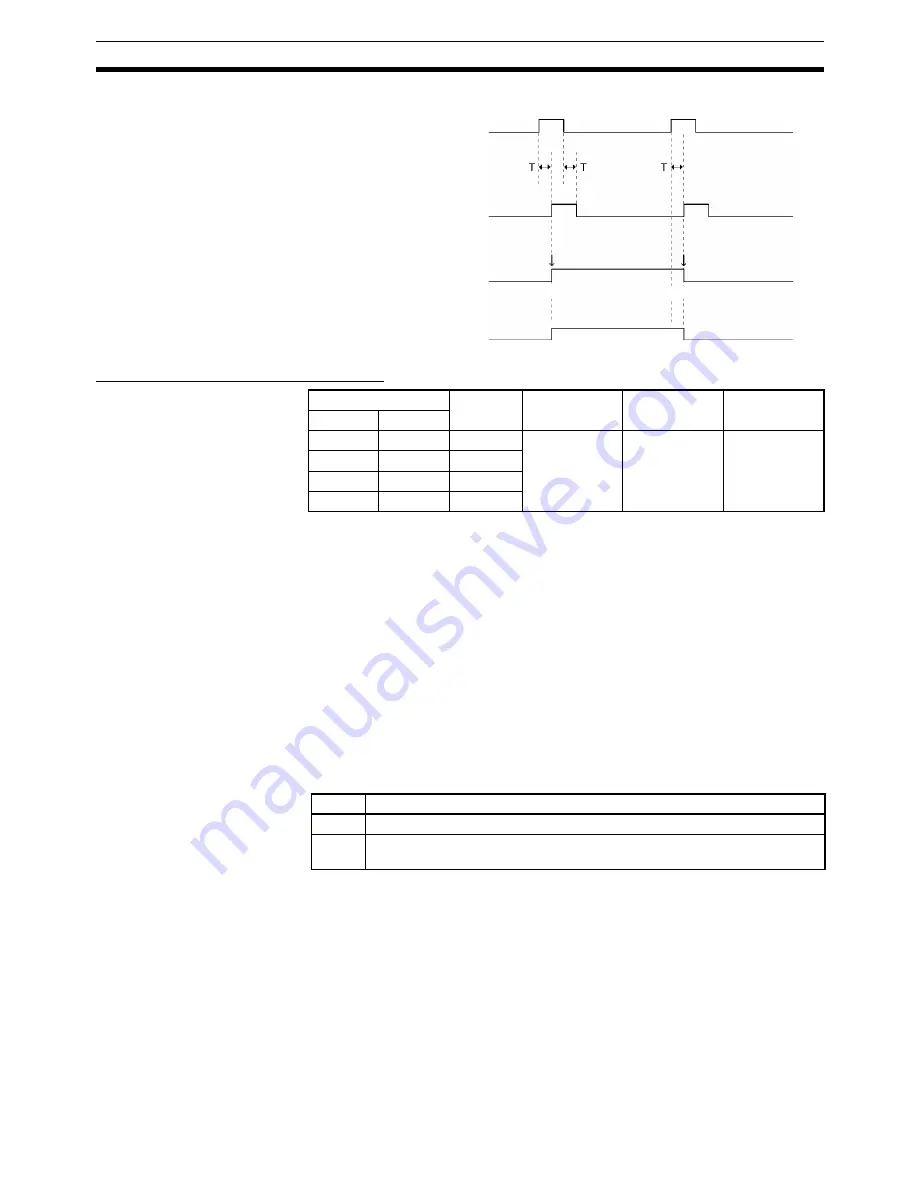
Timing Chart
Teaching Address Overflow Flags
A Teaching Address Overflow Flag will turn ON if the teaching address is not
within the range of position data addresses allocated to the task after execut-
ing a Teaching Command (17E2 to 17E5 hex) for the Command Area using
the IOWR instruction in the ladder diagram or after turning ON the Teaching
Bit (one for each task: n+3, 09, n+7, 09, n+9, 09).
The above error can occur at the following times.
• The teaching address set for IOWR is not within the range of position data
addresses.
• The following condition was not met when turning on the Teaching Bit.
(Current teaching a Number of axes in task) must be within the
position data range for the task. (The current teaching address is set in
the Command Area, the number of axes in the task is set in the unit
parameters, and the task position data range is set in the memory man-
agement parameters.)
Note
The Teaching Address Overflow Flag will not be refreshed immediately after
the IOWR instruction is executed. Check the flag status in the next cycle.
Teaching Bit
(n+3, 09)
Teaching Completed Flag
(n+15, 13/n+23, 13)
Teaching Error Flag
(n+15, 14/n+23, 14)
Teaching address overflow
Teaching Address Over
(n+15, 15/n+23, 15)
Error occurred.
Reset
Word
Task
Bit
I/O
Valid mode
MC221
MC421
n+15
n+23
Task 1
15
Input
---
n+19
n+27
Task 2
---
n+31
Task 3
---
n+35
Task 4
Signal
Meaning
1
The position data address range has been exceeded.
↓
Teaching has been completed normally either via the Teaching Bit or the
IOWR instruction. (See note.)
Summary of Contents for CS1W-MC221 -
Page 1: ...Motion Control Units Cat No W359 E1 04 CS1W MC221 V1 421 V1 OPERATION MANUAL ...
Page 2: ...CS1W MC221 V1 421 V1 Motion Control Units Operation Manual Revised February 2008 ...
Page 3: ...iv ...
Page 5: ...vi ...
Page 11: ...xii ...
Page 15: ...xvi ...
Page 19: ...xx ...
Page 27: ...xxviii Conformance to EC Directives 6 ...
Page 133: ...106 Installation Section 2 2 2 2 4 Dimensions CS1W MC421 CS1W MC221 ...
Page 173: ...146 Connecting Peripheral Devices Section 2 7 ...
Page 227: ...200 Command Area Section 3 6 ...
Page 351: ...324 Interface Specifics Section 5 4 ...
Page 513: ...486 Absolute Encoder Interface Specifications Section 9 7 ...
Page 575: ...548 Error Log Section 12 6 ...
Page 589: ...562 Performance Appendix A ...
Page 655: ...628 Control Bit Flag Timing Charts Appendix E ...
Page 683: ...656 Origin Search Patterns Appendix F ...
Page 685: ...658 Encoder Divider Rate and Rotation Speed for OMRON Servo Drivers Appendix G ...







































































