





























39
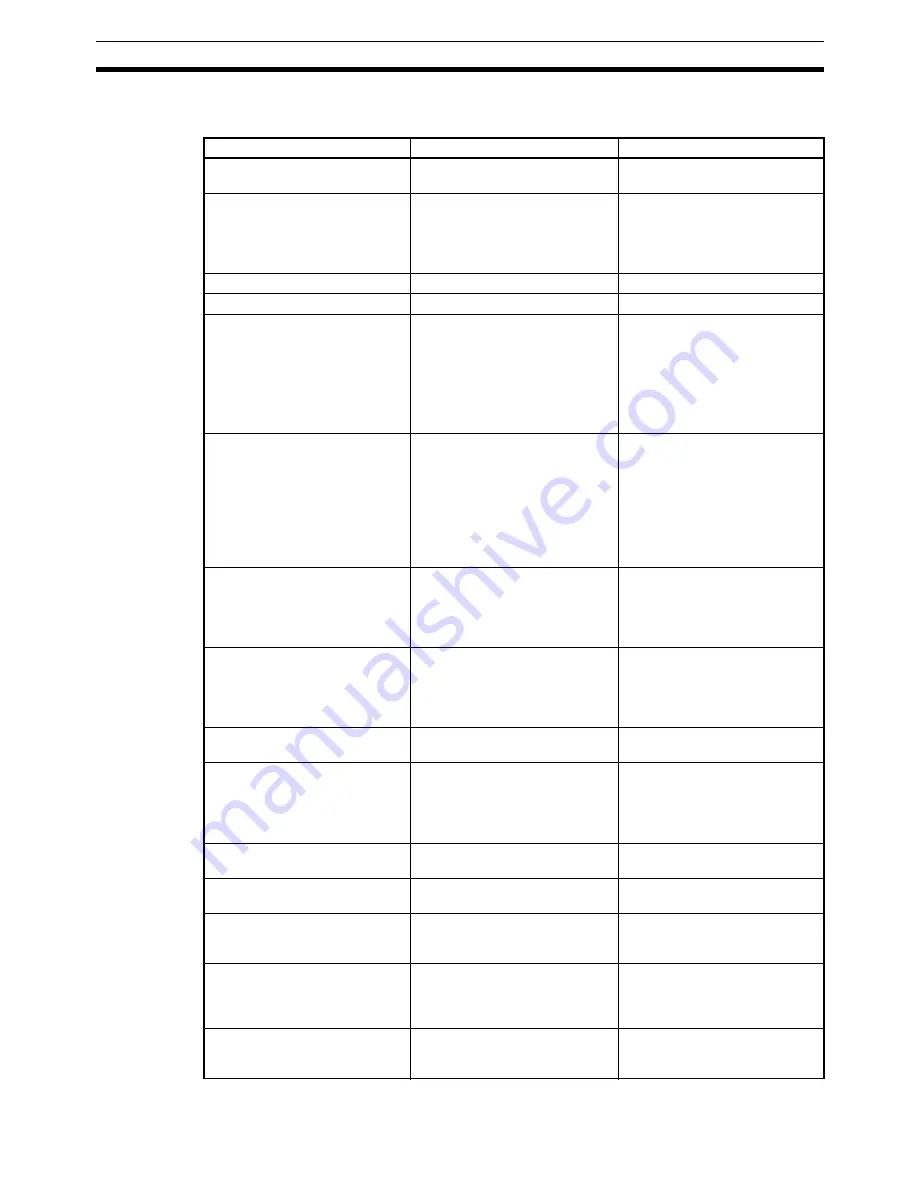
Comparison with Earlier MC Unit Model
Section 1-9
Four-axis MC Unit:
This function applies to the X axis when a 4-axis, 1-task configuration is used.
Item
CS1W-MC221/MC421
C200H-MC221
Interrupt feeding (G31)
Positioning is possible even
without any interrupt signal.
Speed control remains in effect
when there is no interrupt signal.
Override
The feed rate can be changed
during G00, G01, G02, G03,
G26, G27, G30, G31, and G32
operations (except for pass oper-
ations).
The feed rate cannot be changed
during operation.
Backlash setting range
0 to 10,000 pulses
0 to 999 pulses
In-position setting range
0 to 10,000 pulses
0 to 999 pulses
Zone setting
Conditions for using zones:
Use only when origin is deter-
mined, or regardless of whether
or not origin is determined.
The initial setting is for zones to
be used only when the origin is
established.
Use regardless of whether or not
the origin is established.
Origin search
Can be executed even when an
absolute encoder is used.
Parameter can be set to shorten
origin search time.
Either deceleration stop or
accumulated pulse stop can be
selected for when CW or CCW
limit is detected.
Cannot be executed when an
absolute encoder is used.
Not possible to select
deceleration stop or accumulated
pulse stop for when CW or CCW
limit is detected.
Forced origin
Present position can be forcibly
set to 0, and established as the
origin. (In an absolute encoder
system, only the MC Unit’s
present position is set to 0.)
The present position is set to 0
by the present position preset
function.
Absolute encoder origin setting
The absolute encoder origin can
be set even while servo-lock is in
effect.
Origin is set by either the
absolute-value initial setting or
the absolute-value software reset
function. (It cannot be set while
servo-lock is in effect.)
Electronic gear function
The numerator and denominator
can be set.
Integers only
IN-POSITION CHECK OFF
command (G13)
After a positioning command out-
put has been completed, this
command lets the next operation
start without waiting for position-
ing to be completed.
Not supported.
Error counter reset
The error counter can be reset
for each axis.
Not supported.
D code (interrupt code)
Can be used for notifying of the
CPU Unit of interrupts.
Not supported.
Stopover function (Code output
during axis movement)
An M code or D code can be out-
put after a fixed amount of axis
movement during operation.
Not supported.
Acceleration/deceleration time
setting for pass operations
Either the acceleration or decel-
eration time of the previous oper-
ation can be selected for pass
operations.
Pass operations are executed
with the acceleration time.
Fixed acceleration mode for pass
operations
A fixed acceleration mode is
added for when pass operations
are executed for one axis only.
Fixed acceleration time mode
only
Summary of Contents for CS1W-MC221 -
Page 1: ...Motion Control Units Cat No W359 E1 04 CS1W MC221 V1 421 V1 OPERATION MANUAL ...
Page 2: ...CS1W MC221 V1 421 V1 Motion Control Units Operation Manual Revised February 2008 ...
Page 3: ...iv ...
Page 5: ...vi ...
Page 11: ...xii ...
Page 15: ...xvi ...
Page 19: ...xx ...
Page 27: ...xxviii Conformance to EC Directives 6 ...
Page 133: ...106 Installation Section 2 2 2 2 4 Dimensions CS1W MC421 CS1W MC221 ...
Page 173: ...146 Connecting Peripheral Devices Section 2 7 ...
Page 227: ...200 Command Area Section 3 6 ...
Page 351: ...324 Interface Specifics Section 5 4 ...
Page 513: ...486 Absolute Encoder Interface Specifications Section 9 7 ...
Page 575: ...548 Error Log Section 12 6 ...
Page 589: ...562 Performance Appendix A ...
Page 655: ...628 Control Bit Flag Timing Charts Appendix E ...
Page 683: ...656 Origin Search Patterns Appendix F ...
Page 685: ...658 Encoder Divider Rate and Rotation Speed for OMRON Servo Drivers Appendix G ...







































































