





























422
G-language Commands
Section 7-3
The actual settings in the system parameters are not changed by G69.
System parameters will be initialized when the main program is executed
starting from the beginning. If a position data address or register is specified
and the specified data is not an integer, then the value will be rounded off to
the nearest integer. A number range over error will occur if the specified data
is not within the allowable range.
The following is supplemental information for each of the parameters.
<Acceleration time, deceleration time, interpolation acceleration time, interpo-
lation deceleration time>
When the operating mode is Stop Mode or In-position Check OFF Mode, the
new acceleration/deceleration time will be reflected in the next operation.
When the operating mode is Pass Mode and the interpolation acceleration/
deceleration time is changed during linear or circular interpolation, the new
interpolation acceleration/deceleration time will go into effect between G01,
G02, G03, and G32 commands following the G69 command.
<Position loop gain, position loop feed forward gain, in-position, error counter
warning>
In Stop Mode, these values will go into effect with the next G69 command. In
In-position Check OFF Mode, these values will go into effect with the next
G69 command if an axis operation is not in progress and at the end of the
operation command before the G69 command if an axis operation is in
progress.
Values changed with G69 are enabled only during program operation. The
system parameters will be returned when the Program Execution Flag is OFF.
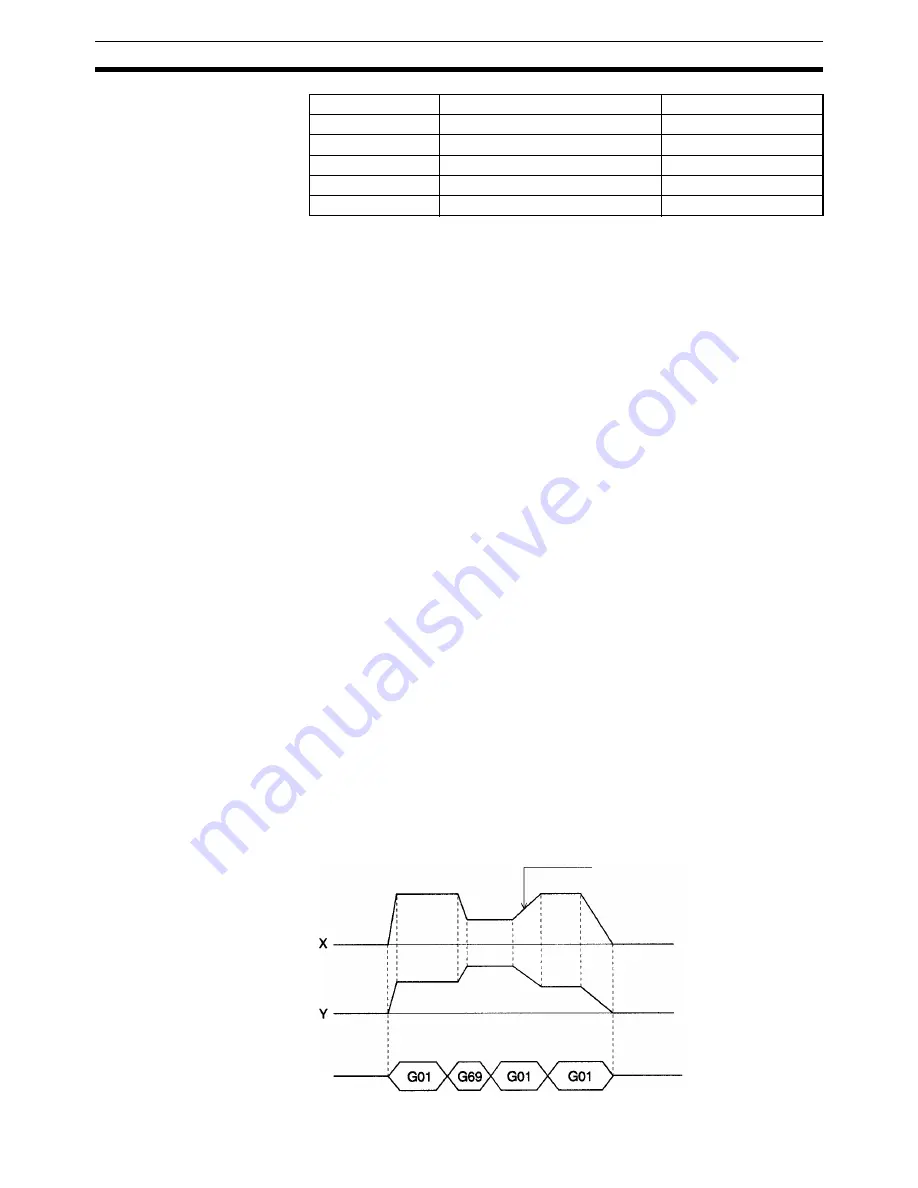
Programming Example
In this programming example, the interpolation acceleration time is changed
during interpolation.
:
:
N009
G01
X200
Y300
N010
G69
#3/X100
N011
G01
X300
Y500
N012
G01
X500
Y800
:
:
#4
Interpolation deceleration time
0 to 100,000 (ms)
#5
Position loop gain
1 to 250 (rad/s)
#6
Position loop feed forward gain
0 to 100 (%)
#7
In-position
0 to 10,000 (pulses)
#8
Error counter warning
0 to 65,000 (pulses)
Parameter type
Parameter
Setting range
The new interpolation acceleration time
goes into effect between the next two
G01 commands after the G69 com-
mand.
Summary of Contents for CS1W-MC221 -
Page 1: ...Motion Control Units Cat No W359 E1 04 CS1W MC221 V1 421 V1 OPERATION MANUAL ...
Page 2: ...CS1W MC221 V1 421 V1 Motion Control Units Operation Manual Revised February 2008 ...
Page 3: ...iv ...
Page 5: ...vi ...
Page 11: ...xii ...
Page 15: ...xvi ...
Page 19: ...xx ...
Page 27: ...xxviii Conformance to EC Directives 6 ...
Page 133: ...106 Installation Section 2 2 2 2 4 Dimensions CS1W MC421 CS1W MC221 ...
Page 173: ...146 Connecting Peripheral Devices Section 2 7 ...
Page 227: ...200 Command Area Section 3 6 ...
Page 351: ...324 Interface Specifics Section 5 4 ...
Page 513: ...486 Absolute Encoder Interface Specifications Section 9 7 ...
Page 575: ...548 Error Log Section 12 6 ...
Page 589: ...562 Performance Appendix A ...
Page 655: ...628 Control Bit Flag Timing Charts Appendix E ...
Page 683: ...656 Origin Search Patterns Appendix F ...
Page 685: ...658 Encoder Divider Rate and Rotation Speed for OMRON Servo Drivers Appendix G ...







































































