





























543
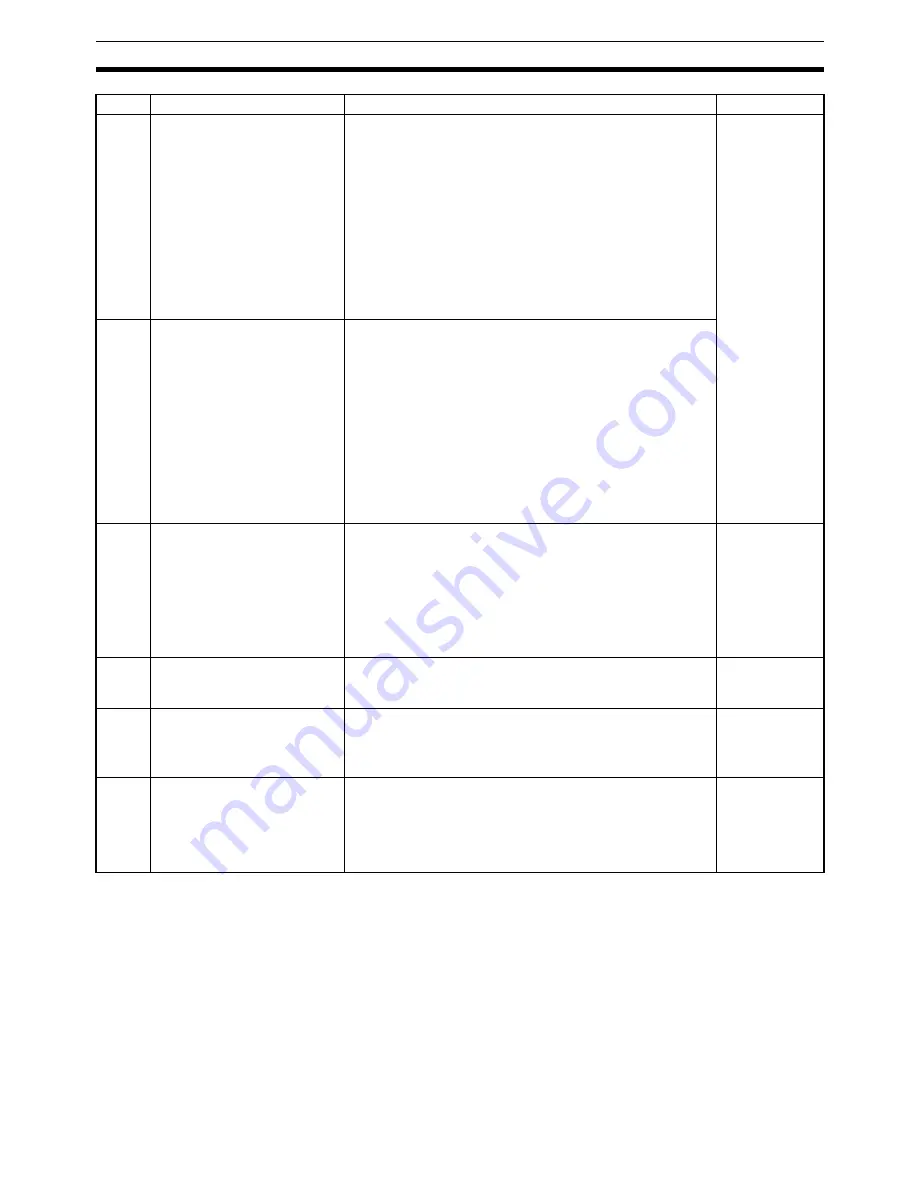
Axis Error Codes
Section 12-5
0043
(0067)
Clockwise software limit
(CW SOFT LIM OVR)
The command value exceeded the CW software limit in an
axis operation, the absolute position exceeded the CW
software limit when an absolute encoder’s position was read,
the command value exceeded the CW software limit in a G53
or G54 command, or the command value exceeded the CW
software limit when the present position preset was executed
from the CPU Unit.
Check whether the software limit in the system parameters is
appropriate. (An error might occur if circular interpolation is
performed very close to the software limit.) Increase the
software limits if they aren’t appropriate. If they are
appropriate, correct the program, position data, or command
value from the CPU Unit.
Deceleration
stop or
accumulated
pulse
(When error is
detected before
start of
operation:
Deceleration
stop
When error is
detected after
start of
operation:
Accumulated
pulse)
0044
(0068)
Counterclockwise software
limit
(CCW SFT LIM OVR)
The command value exceeded the CCW software limit in an
axis operation, the absolute position exceeded the CCW
software limit when an absolute encoder’s position was read,
the command value exceeded the CCW software limit in a
G53 or G54 command, or the command value exceeded the
CCW software limit when the present position preset was
executed from the CPU Unit.
Check whether the software limit in the system parameters is
appropriate. (An error might occur if circular interpolation is
performed very close to the software limit.) Increase the
software limits if they aren’t appropriate. If they are
appropriate, correct the program, position data, or command
value from the CPU Unit.
0045
(0069)
Origin not established
(ORIG NOT ESTABLI)
Attempted to execute an axis movement command even
though the location of the origin hadn’t been established.
When using an incremental encoder, perform an origin
search.
When using an absolute encoder, perform a servo lock and
establish the origin. If the servo lock is already ON, perform a
servo unlock operation and then perform a servo-lock
operation.
Deceleration
stop
0046
(0070)
Servo lock error
(SERVO LOCK ERROR)
Attempted to execute a G-code command or manual
command, but the axis was not in servo lock status. Lock the
servo.
Deceleration
stop
0047
(0071)
PV preset error
(PV PRESET ERROR)
The preset value was out-of-range when a present position
preset command was received from the CPU Unit.
Correct the preset value so that it will be within the
acceptable range.
Deceleration
stop
0048
(0072)
Emergency stop input
(STOP INPUT)
The emergency stop input came ON or an attempt was made
to operate the axis with the emergency stop input ON after
resetting an error.
Clear the emergency stop input.
Accumulated
pulse stop or
emergency stop
(Set in the
system
parameters.)
Code
Error
Error processing
Stop method
Summary of Contents for CS1W-MC221 -
Page 1: ...Motion Control Units Cat No W359 E1 04 CS1W MC221 V1 421 V1 OPERATION MANUAL ...
Page 2: ...CS1W MC221 V1 421 V1 Motion Control Units Operation Manual Revised February 2008 ...
Page 3: ...iv ...
Page 5: ...vi ...
Page 11: ...xii ...
Page 15: ...xvi ...
Page 19: ...xx ...
Page 27: ...xxviii Conformance to EC Directives 6 ...
Page 133: ...106 Installation Section 2 2 2 2 4 Dimensions CS1W MC421 CS1W MC221 ...
Page 173: ...146 Connecting Peripheral Devices Section 2 7 ...
Page 227: ...200 Command Area Section 3 6 ...
Page 351: ...324 Interface Specifics Section 5 4 ...
Page 513: ...486 Absolute Encoder Interface Specifications Section 9 7 ...
Page 575: ...548 Error Log Section 12 6 ...
Page 589: ...562 Performance Appendix A ...
Page 655: ...628 Control Bit Flag Timing Charts Appendix E ...
Page 683: ...656 Origin Search Patterns Appendix F ...
Page 685: ...658 Encoder Divider Rate and Rotation Speed for OMRON Servo Drivers Appendix G ...







































































