





























23
Specifications
Section 1-5
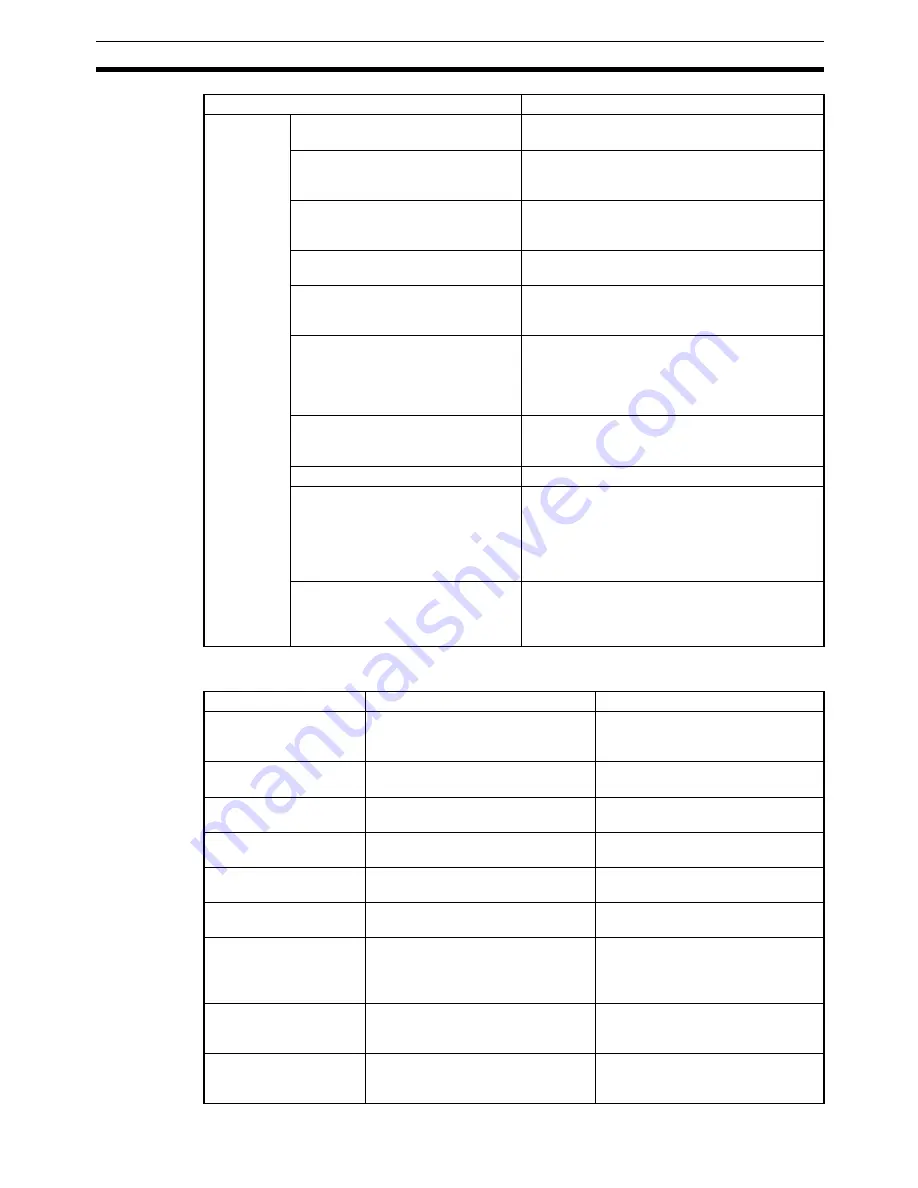
1-5-2
Performance Chart
Automatic
and Manual
Mode
Backlash correction
The amount of correction for backlash in the
mechanical system can be registered in advance.
Error counter reset
Forcibly resets the error counter to 0, and stops
axis operation. (Enabled when no speed
reference is provided to the servo driver.)
Override
Changes the operating speed by applying a
specified percentage to the speed specified in the
system parameters or G-language program.
Zones
A zone flag turns ON when the present position
enters a preset range.
Unlimited Feed Mode, unlimited
present position display
Moves the axis with no limit. In this mode, a range
for refreshing the present position can be speci-
fied.
Origin search function
The search pattern can be selected to shorten
the origin search time. Either a deceleration stop
or accumulated pulse stop can be selected for
when a limit input is received during the origin
search.
Trapezoid/S-curve acceleration and
deceleration
Either trapezoid or S-curve acceleration and
deceleration can be specified for starting and
stopping each axis.
Driver alarm reset
Resets the servo driver alarm.
Data transfer
Data is transferred between the CPU Unit and the
MC Unit by means of the CPU Unit’s IORD and
IOWR instructions. There are two modes for
transferring data: One for transferring large
amounts of data, and another for rapidly
transferring small amounts of data.
Servo data trace function
Up to 500 data items, including speed reference
values, present speed, and error counter data,
can be traced for each axis. This data can be
referenced by CX-Motion.
Item
Typical value
Description
Power ON startup time
Average: 600 ms
Time from turning ON the power until
manual operation commands are
accepted.
Cyclic service time
MC221: 0.8 ms/Unit
MC421: 0.85 ms/Unit
Time by which the CPU Unit cycle
time will be extended per MC Unit.
IOWR execution time
0.7 ms/instruction
Time by which the cycle time will be
extended when IOWR is executed.
IORD execution time
0.8 ms/instruction
Time by which the cycle time will be
extended when IORD is executed.
Data write time
475 ms/1,000 words
Time from when IOWR is executed
until data transfer is completed.
Data read time
470 ms/1,000 words
Time from when IORD is executed
until data transfer is completed.
Operation startup time
MC221: 8 ms
MC421: 12 ms
MC221: Time for X axis operation
with a 1-task, 2-axis configuration.
MC421: Time for X axis operation
with a 1-task, 4-axis configuration.
Analog voltage output
time lag per axis for
interpolation
MC221: 150
µ
s
MC421: 210
µ
s
Time delay when interpolation is
performed for 1 task.
Analog voltage output
time lag per axis for
independent operation
MC221: 4.3 ms/axis
MC421: 4.3 ms/axis
Time delay when one axis each is
started for all tasks simultaneously.
Item
Contents
Summary of Contents for CS1W-MC221 -
Page 1: ...Motion Control Units Cat No W359 E1 04 CS1W MC221 V1 421 V1 OPERATION MANUAL ...
Page 2: ...CS1W MC221 V1 421 V1 Motion Control Units Operation Manual Revised February 2008 ...
Page 3: ...iv ...
Page 5: ...vi ...
Page 11: ...xii ...
Page 15: ...xvi ...
Page 19: ...xx ...
Page 27: ...xxviii Conformance to EC Directives 6 ...
Page 133: ...106 Installation Section 2 2 2 2 4 Dimensions CS1W MC421 CS1W MC221 ...
Page 173: ...146 Connecting Peripheral Devices Section 2 7 ...
Page 227: ...200 Command Area Section 3 6 ...
Page 351: ...324 Interface Specifics Section 5 4 ...
Page 513: ...486 Absolute Encoder Interface Specifications Section 9 7 ...
Page 575: ...548 Error Log Section 12 6 ...
Page 589: ...562 Performance Appendix A ...
Page 655: ...628 Control Bit Flag Timing Charts Appendix E ...
Page 683: ...656 Origin Search Patterns Appendix F ...
Page 685: ...658 Encoder Divider Rate and Rotation Speed for OMRON Servo Drivers Appendix G ...







































































