





























328
Linear Interpolation
Section 6-3
Acceleration Time and
Deceleration Time
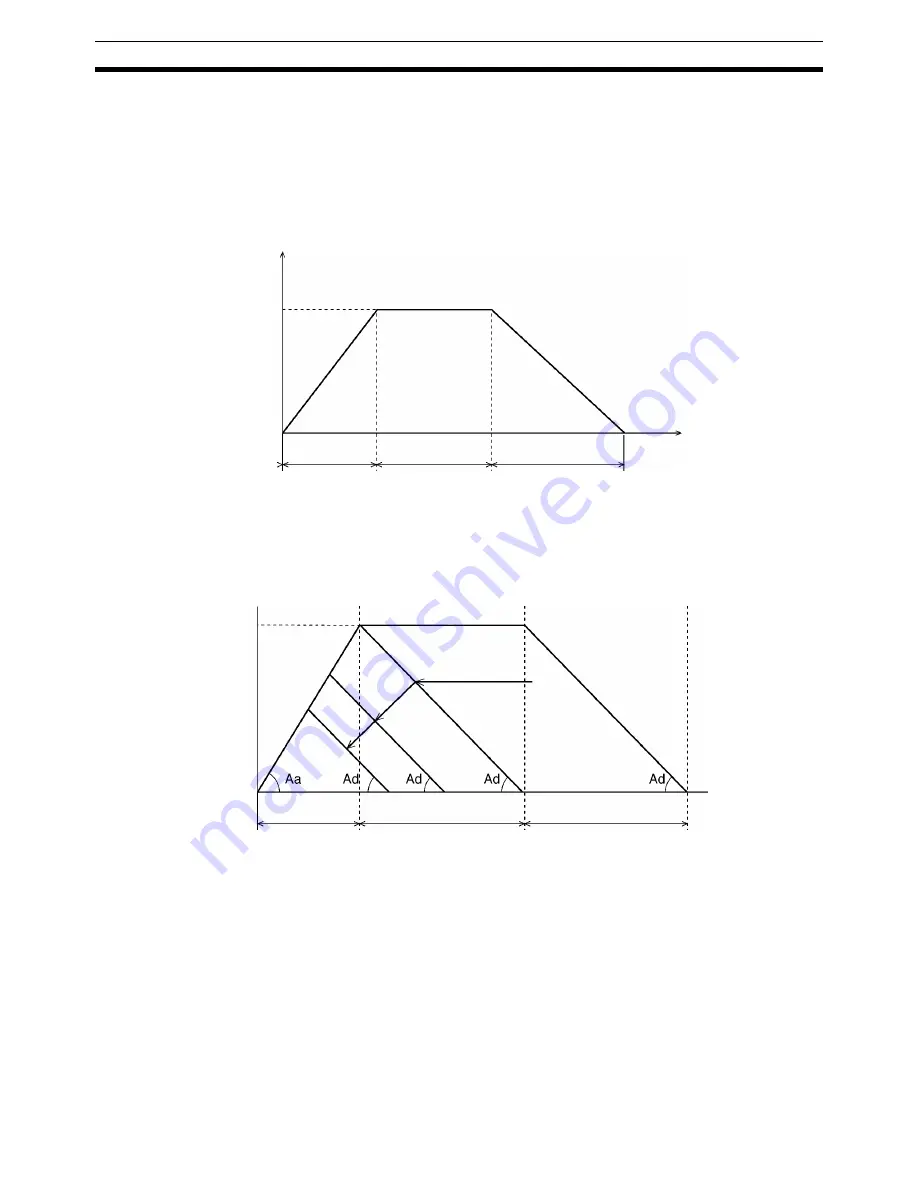
Acceleration and deceleration times under the PTP control are as follows:
Acceleration time:
Time required until the single axis speed reaches the
maximum feed rate.
Deceleration time:
Time required until the speed control voltage drops to
zero from the maximum feed rate of the single axis.
The acceleration time and deceleration time (feed rate parameters) are set
either from the CX-Motion or by using IOWR in the ladder program.
Overrides can be set to alter the acceleration time and deceleration time. The
acceleration speed, however, will remain constant.
Note
Refer to
6-12 Override Function
for details on the override function.
Triangular Control
If the travel time is shorter than the sum of acceleration time and deceleration
time, triangular control will occur as shown below.
The ratio of acceleration time and deceleration time in the triangular control
will be the same as the ratio of acceleration time and deceleration time set in
the feed rate parameters.
6-3
Linear Interpolation
Overview
Mode:
Automatic;
Method:
G language (G01)
Positioning with linear interpolation produces a straight line that connects a
preset starting point to a preset end point using all specified axes (X to U). For
details on using linear interpolation with the G language, refer to
7-3-2 G01:
LINEAR INTERPOLATION
.
Maximum feed
rate
Acceleration
time
Constant
speed time
Deceleration
time
Time
Speed
0
Maximum feed
rate
Travel time: short
Acceleration
time
Constant speed time
Deceleration time
Time
Aa: Acceleration during the acceleration time
Ad: Deceleration during the deceleration time
0
Summary of Contents for CS1W-MC221 -
Page 1: ...Motion Control Units Cat No W359 E1 04 CS1W MC221 V1 421 V1 OPERATION MANUAL ...
Page 2: ...CS1W MC221 V1 421 V1 Motion Control Units Operation Manual Revised February 2008 ...
Page 3: ...iv ...
Page 5: ...vi ...
Page 11: ...xii ...
Page 15: ...xvi ...
Page 19: ...xx ...
Page 27: ...xxviii Conformance to EC Directives 6 ...
Page 133: ...106 Installation Section 2 2 2 2 4 Dimensions CS1W MC421 CS1W MC221 ...
Page 173: ...146 Connecting Peripheral Devices Section 2 7 ...
Page 227: ...200 Command Area Section 3 6 ...
Page 351: ...324 Interface Specifics Section 5 4 ...
Page 513: ...486 Absolute Encoder Interface Specifications Section 9 7 ...
Page 575: ...548 Error Log Section 12 6 ...
Page 589: ...562 Performance Appendix A ...
Page 655: ...628 Control Bit Flag Timing Charts Appendix E ...
Page 683: ...656 Origin Search Patterns Appendix F ...
Page 685: ...658 Encoder Divider Rate and Rotation Speed for OMRON Servo Drivers Appendix G ...







































































