





























291
Interface Specifics
Section 5-4
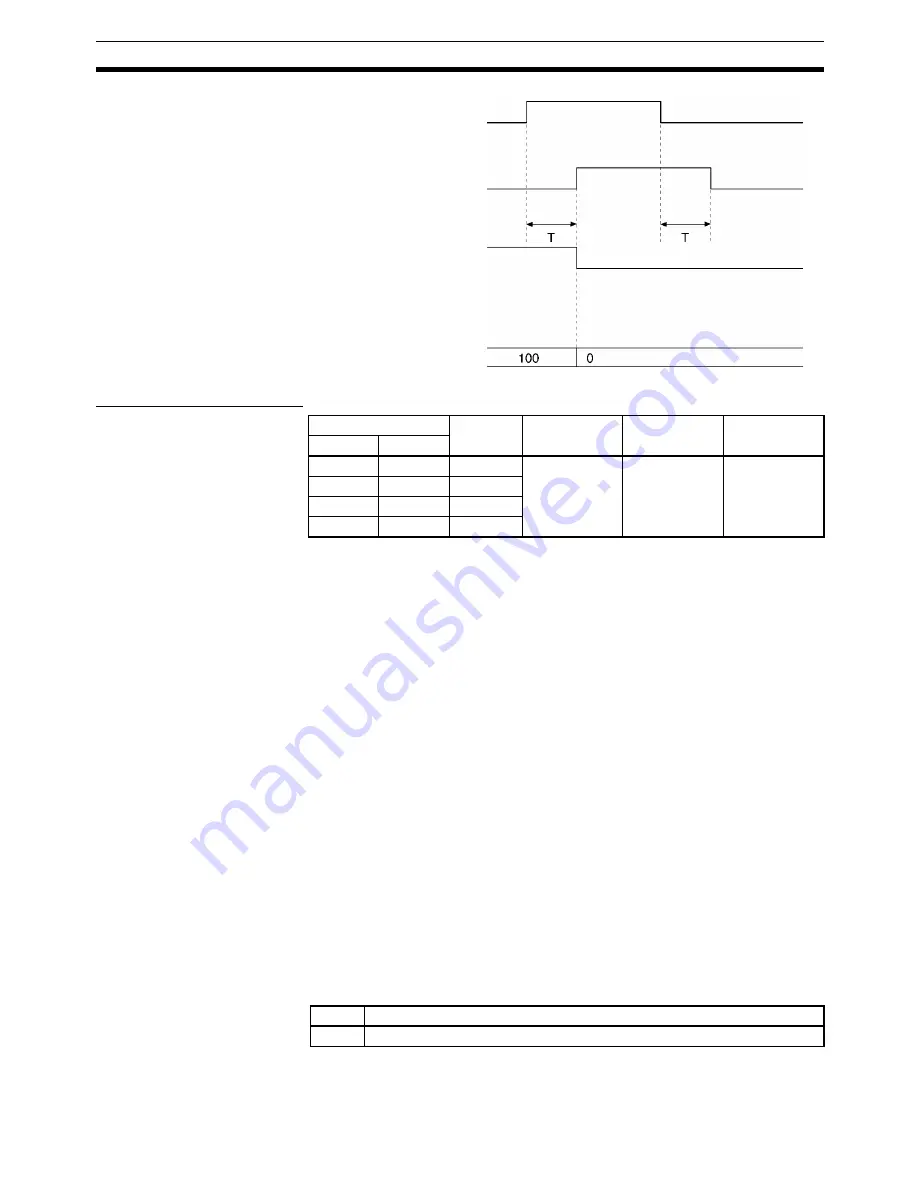
Timing Chart
Absolute Origin Set Bits
These bits set the mechanical origin for axes using an absolute encoder.
Operation depends on whether the servo is locked or unlocked.
Servo-unlock Status
The absolute position is read from the encoder, the absolute position read
from the encoder is stored as the absolute position in the system parameters
(machine specification parameters), and the present position in the MC Unit is
set to 0. The current system parameters are then saved in non-volatile mem-
ory.
Servo-lock Status
The present position in the MC Unit is stored as the absolute position in the
system parameters (machine specification parameters), and the present posi-
tion in the MC Unit is set to 0. The current system parameters are then saved
in non-volatile memory.
Incremental Encoder
If an incremental encoder is being used, the current system parameters are
saved in non-volatile memory and nothing else is performed.
Timing
An Absolute Origin Set Bit is ignored when the Busy Flag is ON.
Keep the bit ON until the Busy Flag turns ON.
Note
Do not execute this command while system parameters are being down-
loaded. Doing so may result in an incorrect setting of the mechanical origin.
Forced Origin Bit
(n + 7, 05/n+11, 05)
Busy Flag
(n+22, 01/n+38, 01)
Present Position
(n+20, n+21/n+36, n+37)
No Origin Flag
(n+22, 03/n+38, 03)
Word
Axis
Bit
I/O
Valid mode
MC221
MC421
n+7
n+11
X axis
06
Output
Manual
n+9
n+13
Y axis
---
n+15
Z axis
---
n+17
U axis
Signal
Function
↑
Sets the absolute origin.
Summary of Contents for CS1W-MC221 -
Page 1: ...Motion Control Units Cat No W359 E1 04 CS1W MC221 V1 421 V1 OPERATION MANUAL ...
Page 2: ...CS1W MC221 V1 421 V1 Motion Control Units Operation Manual Revised February 2008 ...
Page 3: ...iv ...
Page 5: ...vi ...
Page 11: ...xii ...
Page 15: ...xvi ...
Page 19: ...xx ...
Page 27: ...xxviii Conformance to EC Directives 6 ...
Page 133: ...106 Installation Section 2 2 2 2 4 Dimensions CS1W MC421 CS1W MC221 ...
Page 173: ...146 Connecting Peripheral Devices Section 2 7 ...
Page 227: ...200 Command Area Section 3 6 ...
Page 351: ...324 Interface Specifics Section 5 4 ...
Page 513: ...486 Absolute Encoder Interface Specifications Section 9 7 ...
Page 575: ...548 Error Log Section 12 6 ...
Page 589: ...562 Performance Appendix A ...
Page 655: ...628 Control Bit Flag Timing Charts Appendix E ...
Page 683: ...656 Origin Search Patterns Appendix F ...
Page 685: ...658 Encoder Divider Rate and Rotation Speed for OMRON Servo Drivers Appendix G ...







































































