





























358
Backlash Correction
Section 6-15
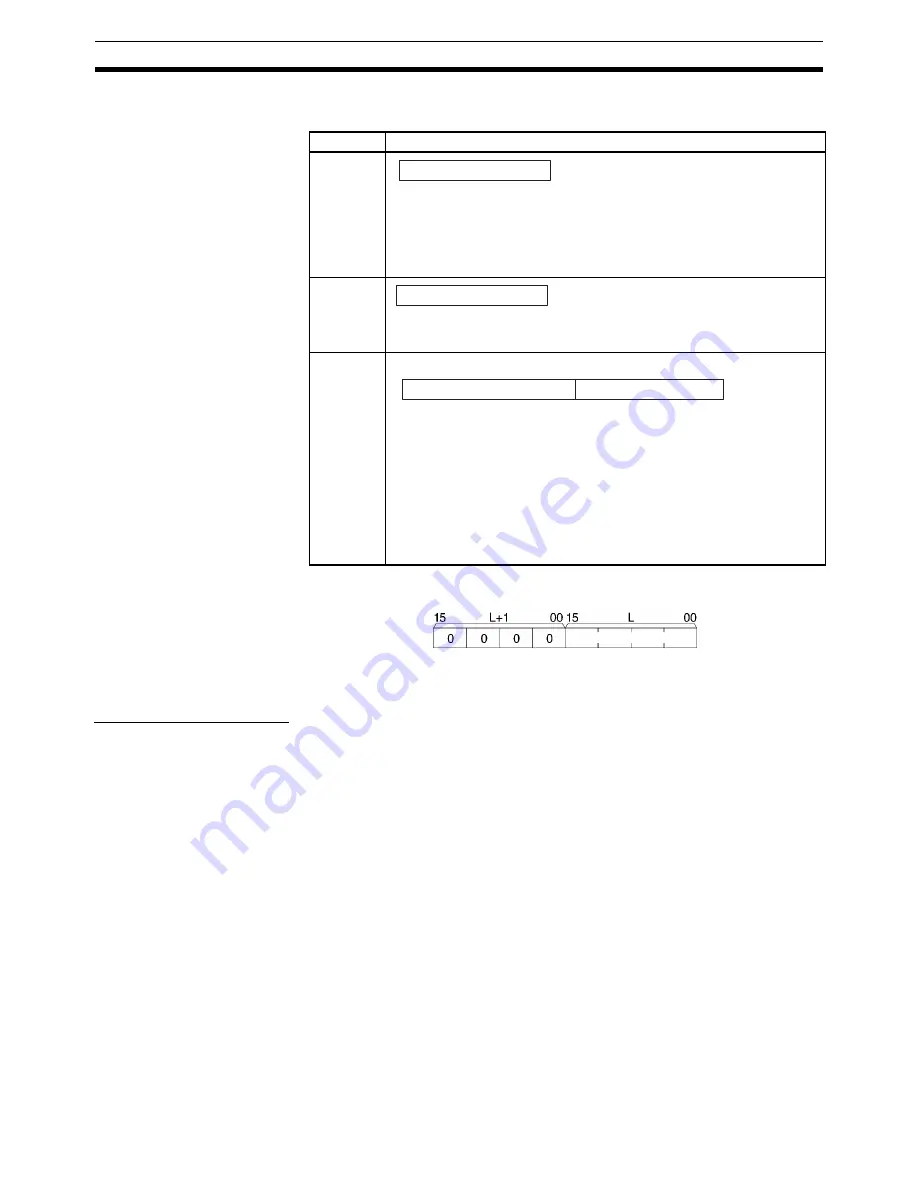
C: Control code, S: First source word, D: Destination unit number and total
number of words to transfer
Transfer Data
Set the following data in the words beginning at the first source word, and exe-
cute the IOWR instruction.
Set the backlash correction value for the X and Y axes between 0000 and
2710 hex (0 to 10,000).
Programming Example
In the following example for transferring data, the MC Unit is mounted to a CS-
series PLC and assigned unit number 0. In this example, the backlash correc-
tion value is set to 1,000 pulses, and the IOWR operands and the data to be
transferred are assumed to be normal.
When debugging, check the Error Flags from the ladder program.
Operand
Description
C
S
D
Specifies the first address in the MC Unit to which data will be written.
X axis: Address 11FC Hex (4604)
Y axis: Address 1215 Hex (4629)
Z axis: Address 122E Hex (4654)
U axis: Address 1247 Hex (4679)
MC Unit address (Hex)
Specifies the first word in the CPU Unit from which data is to be trans-
ferred.
First source word
Specify the destination unit number to which data will be transferred
and the total number of words to transfer.
Number of words to transfer:
Always 0002 Hex. (Refer to Transfer Data below.)
Destination unit number:
MC221: 0000 to 005D Hex (Unit numbers 0 to 93)
MC421: 0000 to 005B Hex (Unit numbers 0 to 91)
Example: #0002003, when two words of data are transferred to Unit
#3.
Total number of words to transfer (Hex)
Destination unit number (Hex)
D+1
D
Backlash correction value
Summary of Contents for CS1W-MC221 -
Page 1: ...Motion Control Units Cat No W359 E1 04 CS1W MC221 V1 421 V1 OPERATION MANUAL ...
Page 2: ...CS1W MC221 V1 421 V1 Motion Control Units Operation Manual Revised February 2008 ...
Page 3: ...iv ...
Page 5: ...vi ...
Page 11: ...xii ...
Page 15: ...xvi ...
Page 19: ...xx ...
Page 27: ...xxviii Conformance to EC Directives 6 ...
Page 133: ...106 Installation Section 2 2 2 2 4 Dimensions CS1W MC421 CS1W MC221 ...
Page 173: ...146 Connecting Peripheral Devices Section 2 7 ...
Page 227: ...200 Command Area Section 3 6 ...
Page 351: ...324 Interface Specifics Section 5 4 ...
Page 513: ...486 Absolute Encoder Interface Specifications Section 9 7 ...
Page 575: ...548 Error Log Section 12 6 ...
Page 589: ...562 Performance Appendix A ...
Page 655: ...628 Control Bit Flag Timing Charts Appendix E ...
Page 683: ...656 Origin Search Patterns Appendix F ...
Page 685: ...658 Encoder Divider Rate and Rotation Speed for OMRON Servo Drivers Appendix G ...







































































