





























12 - 15
Chapter 12 Expansion Control
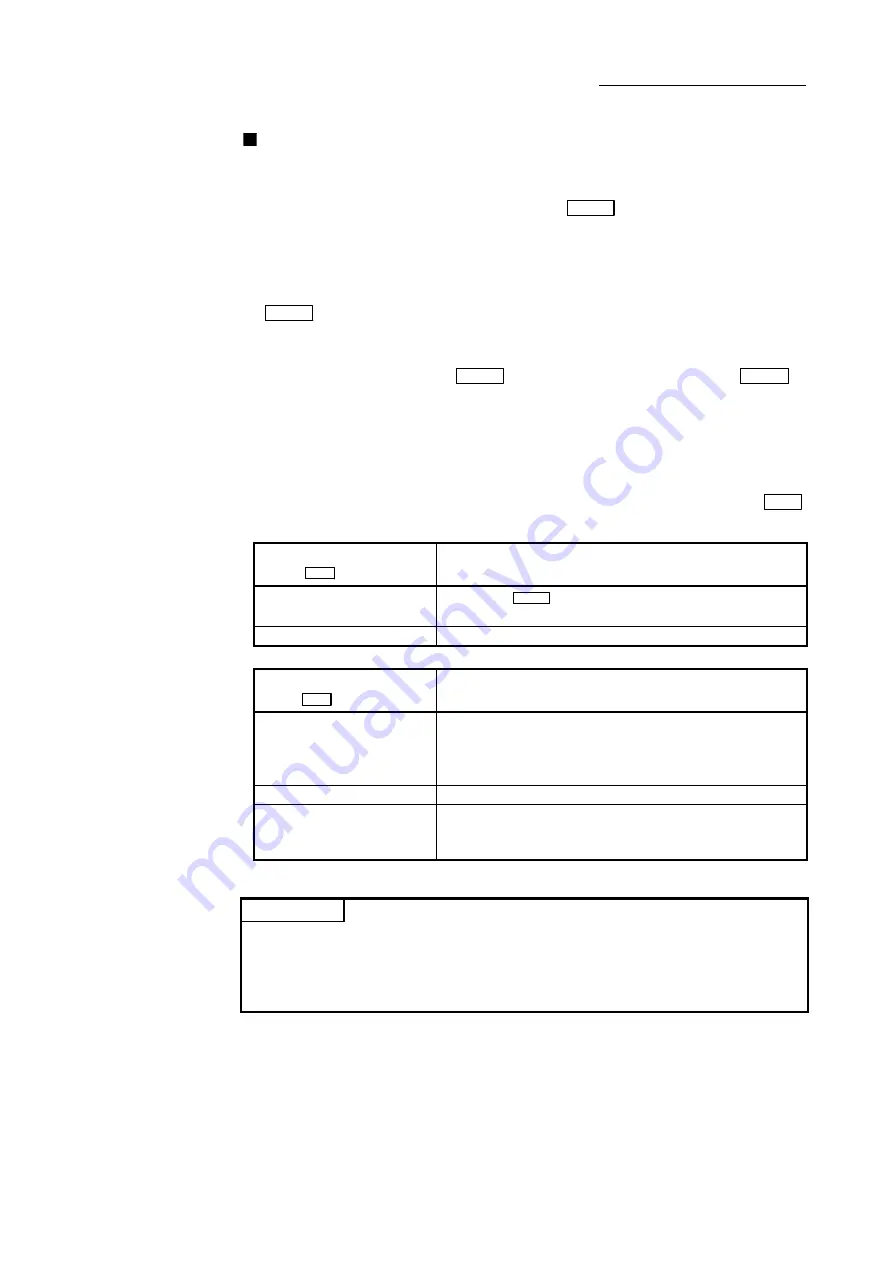
Operation for "Position control mode
↔
Continuous operation to torque
control mode switching"
To switch to the continuous operation to torque control mode, set the control data
used in the control mode before setting "1" in "
Cd.138
Control mode switching
request
".
When the switching condition is satisfied at control mode switching request, "1:
Position control mode - continuous operation to torque control mode, speed
control mode - continuous operation to torque control mode switching" is set in
"
Md.124
Control mode switching status
" and the BUSY signal turns ON. (When the
control mode switching request is executed while the BUSY signal is ON, the
BUSY signal does not turn OFF but stays ON at control mode switching.)
"0" is automatically stored in "
Cd.138
Control mode switching request
" and "
Md.124
Control mode switching status
" after completion of switching.
When the position control mode is switched to the continuous operation to torque
control mode, the command torque and command speed immediately after the
switching are the values set according to the following setting in "Torque initial
value selection (b4 to b7)" and "Speed initial value selection (b8 to b11)" of "
Pr.90
Operation setting for speed-torque control mode
".
Torque initial value selection
(
Pr.90
: b4 to b7)
Command torque to servo amplifier immediately after switching from
position control mode to continuous operation to torque control mode
0: Command torque
The value of "
Cd.150
Target torque at continuous operation to torque control
mode
" at switching.
1: Feedback torque
Motor torque value at switching.
Speed initial value selection
(
Pr.90
: b8 to b11)
Command speed to servo amplifier immediately after switching from
position control mode to continuous operation to torque control mode
0: Command speed
Speed that the position command at switching is converted into the
motor speed.
(When the positioning does not start at switching, the speed to servo
amplifier immediately after switching is "0".)
1: Feedback speed
Motor speed received from servo amplifier at switching.
2: Automatic selection
The lower speed between speed that position command at switching
is converted into the motor speed and motor speed received from
servo amplifier at switching.
POINT
When the mode is switched to continuous operation to torque control mode in cases
where command speed and actual speed are different such as during
acceleration/deceleration or when the speed does not reach command speed due to
torque limit, set "1: Feedback speed" in "Speed initial value selection (b8 to b11)".
Summary of Contents for MELSEC-L Series
Page 2: ......
Page 30: ...MEMO ...
Page 70: ...2 10 Chapter 2 System Configuration MEMO ...
Page 83: ...3 13 Chapter 3 Specifications and Functions MEMO ...
Page 103: ...3 33 Chapter 3 Specifications and Functions MEMO ...
Page 107: ...3 37 Chapter 3 Specifications and Functions MEMO ...
Page 111: ...3 41 Chapter 3 Specifications and Functions MEMO ...
Page 115: ...3 45 Chapter 3 Specifications and Functions MEMO ...
Page 140: ...4 22 Chapter 4 Installation Wiring and Maintenance of the Product MEMO ...
Page 253: ...5 113 Chapter 5 Data Used for Positioning Control MEMO ...
Page 342: ...5 202 Chapter 5 Data Used for Positioning Control MEMO ...
Page 438: ...7 20 Chapter 7 Memory Configuration and Data Process MEMO ...
Page 440: ...MEMO ...
Page 485: ...9 25 Chapter 9 Major Positioning Control MEMO ...
Page 594: ...9 134 Chapter 9 Major Positioning Control MEMO ...
Page 624: ...10 30 Chapter 10 High Level Positioning Control MEMO ...
Page 656: ...11 32 Chapter 11 Manual Control MEMO ...
Page 690: ...12 34 Chapter 12 Expansion Control MEMO ...
Page 798: ...13 108 Chapter 13 Control Sub Functions MEMO ...
Page 866: ...14 68 Chapter 14 Common Functions MEMO ...
Page 884: ...15 18 Chapter 15 Dedicated Instructions MEMO ...
Page 899: ...16 15 Chapter 16 Troubleshooting MEMO ...
Page 1036: ...Appendix 88 Appendices MEMO ...
Page 1039: ......







































































