





























550
List of Parameters
Appendix B
Pn201
Forward
Software
Limit
4
Sets the soft limit in the forward direction.
If the Servomotor exceeds the limit, the network response status
(PSOT) will turn ON (=1).
Note
Be sure to set the limits so that Forward Software Limit >
Reverse Software Limit.
Note
PSOT is not turned ON when origin return is incomplete.
500000
Com-
mand
units
−
1073741823
to
1073741823
Online
Pn202
Reverse
Software
Limit
4
Sets the soft limit for the reverse direction.
If the Servomotor exceeds the limit, the network response status
(NSOT) will turn ON (=1).
Note
Be sure to set the limits so that Forward Software Limit >
Reverse Software Limit.
Note
NSOT is not turned ON when origin return is incomplete.
−
500000
Com-
mand
units
−
1073741823
to
1073741823
Online
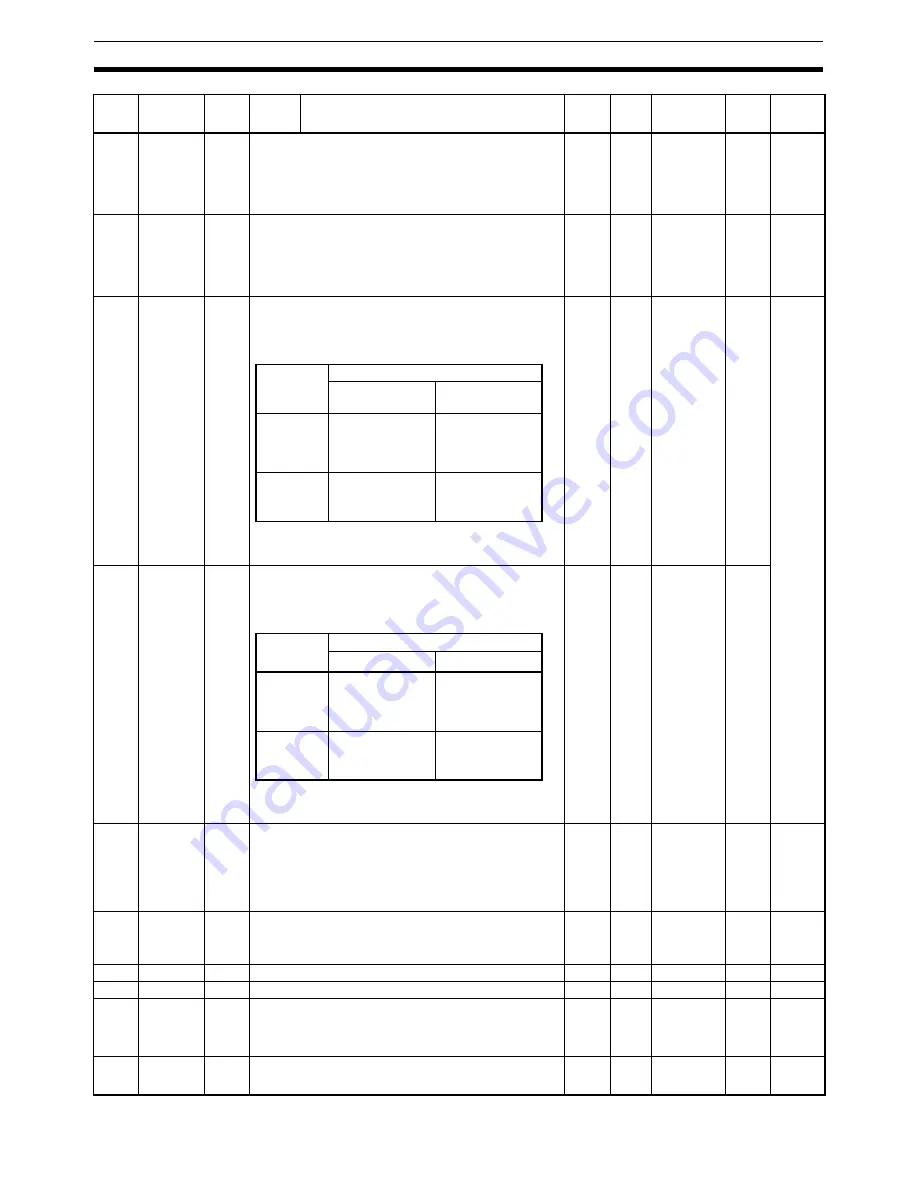
Pn203
Final Dis-
tance for
External
Input Posi-
tioning
4
Sets the distance to travel after detecting the latch signal input
position when performing external input positioning.
The operation after detecting the latch signal input position will be
determined by the external input positioning direction and this
parameter as follows.
*1. Reverses after decelerating to a stop if the final distance for
external input positioning is short in comparison to the deceler-
ation distance.
100
Com-
mand
units
−
1073741823
to
1073741823
Online
Settings
can be
changed
when the
axes are
stopped
(Busy
Flag for
each axis
= 0).
Pn204
Origin
Return
Final Dis-
tance
4
Sets the distance from the latch signal input position to the origin
when performing origin return.
The operation after detecting the latch signal input position will be
determined by the origin return direction and this parameter as fol-
lows.
*1. Reverses after decelerating to a stop if the final travel distance
for origin return is short in comparison to the deceleration dis-
tance.
100
Com-
mand
units
−
1073741823
to
1073741823
Online
Pn205
Electronic
Gear Ratio
1 (Numera-
tor)
4
Sets the numerator for the electronic gear ratio.
Setting this parameter to 0 automatically sets the encoder resolu-
tion as the numerator. (131072 for a 17-bit absolute encoder, or
10000 for a 2,500-p/r incremental encoder).
Note
Set the electronic gear ratio within the range of 1/100 to
100 times. A parameter setting alarm (alarm code 93) will
occur if the ratio is set outside of this range.
1
---
0 to 131072
Offline
Pn206
Electronic
Gear Ratio
2 (Denomi-
nator)
4
Sets the denominator for the electronic gear ratio.
Note
Set the electronic gear ratio within the range of 1/100 to
100 times. A parameter setting alarm (Alarm code 93) will
occur if the ratio is set outside of this range.
1
---
1 to 65535
Offline
Pn207
Reserved
---
Do not change.
0
---
---
---
Pn208
Reserved
---
Do not change.
0
---
---
---
Pn209
Deviation
Counter
Overflow
Level
4
Sets the deviation counter overflow level.
The value will become saturated at 134217728 (= 2
27
) pulses after
multiplying with the electronic gear ratio.
Setting this parameter to 0 will disable deviation counter overflow.
20000
Com-
mand
units
0 to
2147483647
Online
Pn20A
to
Pn21F
Reserved
---
Do not change.
0
---
---
---
Param-
eter
No.
Parameter
name
Param-
eter
size
Setting
Explanation
Default
setting
Unit
Setting
range
Enable
setting
Details
External
input
positioning
direction
Sign
Positive
Negative
Positive
direction
Moves in the positive
direction and stops
*1
Decelerates to a
stop, reverses, then
moves in the nega-
tive direction and
stops
Negative
direction
Decelerates to a
stop, reverses, then
moves in the positive
direction and stops
Moves in the nega-
tive direction and
stops
*1
Origin
return
direction
Sign
Positive
Negative
Positive
direction
Moves in the positive
direction and stops*1
Decelerates to a
stop, reverses, then
moves in the nega-
tive direction and
stops
Negative
direction
Moves in the nega-
tive direction and
stops
*1
Decelerates to a
stop, reverses, then
moves in the positive
direction and stops
Содержание CJ1W-NC271 - 12-2009
Страница 2: ......
Страница 4: ...iv ...
Страница 6: ...vi ...
Страница 22: ...xxii ...
Страница 58: ...30 Starting Operation Section 2 2 ...
Страница 244: ...216 Axis Operating Input Memory Areas Section 4 8 ...
Страница 264: ...236 Transferring Servo Parameters Section 5 3 ...
Страница 396: ...368 Linear Interpolation Section 9 7 ...
Страница 648: ...620 List of Error Codes Appendix D ...
Страница 674: ...646 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Страница 684: ...656 Index ...
Страница 686: ...658 Revision History ...







































































