





























55
External I/O Circuits
Section 3-3
Note
(1) If the limit input signal inputs (Servo Drive's forward drive prohibited sig-
nal and reverse drive prohibited signal) are not allocated, the Servo Drive
will not stop the Servomotor when the signal is input, and the Position
Control Unit will also not detect limit inputs as errors. When using a Posi-
tion Control Unit, always allocate the Servo Drive's forward drive prohib-
ited signal and reverse drive prohibited signal to enable use of the limit
input signals. (Refer to
6-4 Standard Settings for Servo Drives Using
MECHATROLINK
.)
(2) The signal width of the limit input signals (forward drive prohibited signal
and reverse drive prohibited signal) and origin proximity input signal (ori-
gin return deceleration limit switch) must be longer than the MECHA-
TROLINK communications cycle. If the input signal width is shorter than
the communications cycle, the Position Control Unit will be unable to de-
tect the input signal.
(3) When selecting a sensor for the origin proximity input signal (origin return
deceleration LS), use a sensor such as a Photoelectric Sensor, which
does not have chattering, because the origin signal is detected after the
input goes from ON to OFF during the origin search. If a switch with con-
tacts is used, the origin position may shift due to the switch contact's chat-
tering.
(4) The SMARTSTEP Junior Servo Drive's emergency stop input stops the
Servomotor using software processing. If required for system safety, add
a safety circuit in an external circuit.
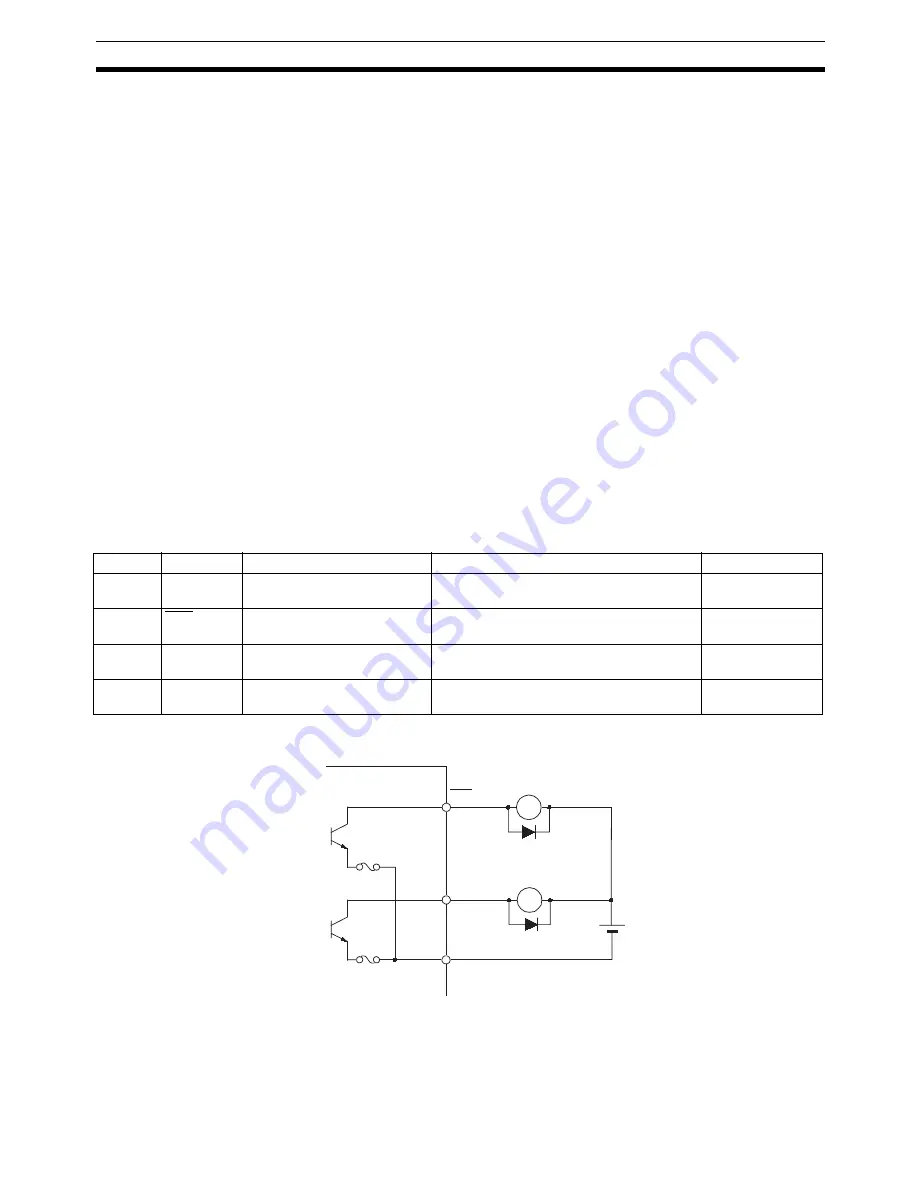
CN1 Control Output Signals
Control Input Circuits
Note
The circuit is equipped with an auto-resetting circuit breaker to pro-
tect the output. Even if an overcurrent trips the breaker, the breaker
will reset automatically after a certain time elapses with no current.
Pin No.
Signal
Name
Function/interface
Control mode
7
0GND
Output ground common
The ground common for control output sig-
nals.
All modes
12
ALM
Alarm output
Turns OFF when an alarm occurs in the
Servo Drive.
All modes
13
BKIR
Brake interlock output
Output as a timing signal for a holding brake
when the Servo is locked or unlocked.
All modes
Shell
FG
Frame ground
The connection point for the cable shield
and FG line.
All modes
Di
Di
12
13
7
0GND
ALM
BKIR
Servo Drive
External power
supply: 24
±
1 VDC
Maximum applicable voltage: 30 VDC
Maximum output current: 50 mA
Di: Diode to suppress surge voltage
(Use a high-speed diode.)
Содержание CJ1W-NC271 - 12-2009
Страница 2: ......
Страница 4: ...iv ...
Страница 6: ...vi ...
Страница 22: ...xxii ...
Страница 58: ...30 Starting Operation Section 2 2 ...
Страница 244: ...216 Axis Operating Input Memory Areas Section 4 8 ...
Страница 264: ...236 Transferring Servo Parameters Section 5 3 ...
Страница 396: ...368 Linear Interpolation Section 9 7 ...
Страница 648: ...620 List of Error Codes Appendix D ...
Страница 674: ...646 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Страница 684: ...656 Index ...
Страница 686: ...658 Revision History ...







































































