





























397
Speed Control
Section 10-5
If operation stops due to an error (except stopping that puts Servo in free run
state), the Servomotor stops in position control mode (deceleration stop or
emergency stop) and remains in position control mode (Servo lock status)
after stopping. After turning ON the power to the PCU or restarting the Unit
and executing CONNECT or SERVO LOCK, the PCU will be put in the posi-
tion control mode and in Servo lock status.
Note
When SERVO UNLOCK is executed during speed control or torque
control, the Servo Drive will recover in the position control mode
and in Servo lock status the next time the SERVO LOCK command
is executed. If MECHATROLINK communications are stopped
(connection released) or the power to the PCU is interrupted during
speed control or torque control, the Servo Drive will be put in Servo
free run state in the previous control mode. While in this state, if
MECHATROLINK communications are started (connection estab-
lished) and SERVO LOCK is executed, the Servomotor starts op-
erating immediately in the previous command state. The speed
monitor and torque monitor in the PCU’s expanded monitoring
functions will also not function properly. To stop MECHATROLINK
communications while in speed control or torque control mode, use
DECELERATION STOP or another command that will switch the
Servo Drive to position control, and execute the next SERVO LOCK
command in position control mode. If the Servo is in a free run state
during speed control or torque control (due to an error or other
cause), execute DEVICE SETUP before the next SERVO LOCK
and switch the Servo Drive to position control mode.
When switching to position control from speed control or torque control, the
feedback speed for executing operating commands in position control is used
as the start speed. Movement to the position control target speed or stop
operation is then performed using the acceleration/deceleration set in the
Servo Parameters for acceleration/deceleration.
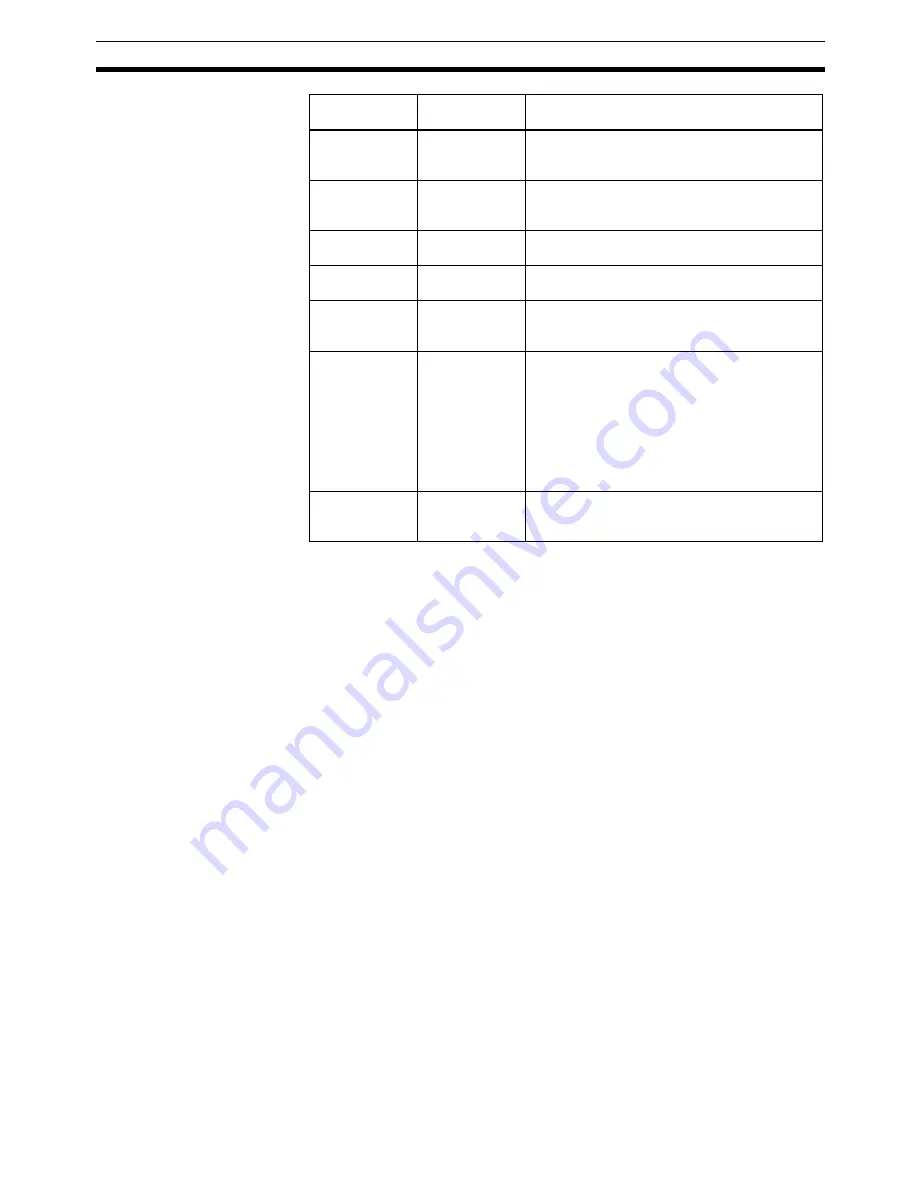
JOG
Position control
A multistart error occurs when the command
starts from any control mode, and deceleration
stop is executed in position control mode.
DECELERA-
TION STOP
Position control
Switches to position control when the command
starts from any control mode, and deceleration
stop is executed.
SPEED CON-
TROL
Speed control
Switches to speed control when the command
starts from any control mode.
TORQUE CON-
TROL
Torque control
Switches to torque control when the command
starts from any control mode.
EMERGENCY
STOP
Position control
Switches to position control when the command
starts from any control mode, and emergency
stop is executed.
SERVO
UNLOCK
Position control
When executing SERVO UNLOCK, the PCU
executes DECELERATION STOP for the Servo
Drive, followed immediately (without waiting for
the axis to stop) by SERVO UNLOCK. When
SERVO UNLOCK is executed during speed con-
trol or torque control, the Servo Drive will
recover in the position control mode's Servo lock
status the next time the SERVO LOCK com-
mand is executed.
DEVICE SETUP Position control
Switches to position control when the command
starts, and recovers in position control mode
when SERVO LOCK is executed.
Operating
command
Control mode
Operation when operating command is
executed
Содержание CJ1W-NC271 - 12-2009
Страница 2: ......
Страница 4: ...iv ...
Страница 6: ...vi ...
Страница 22: ...xxii ...
Страница 58: ...30 Starting Operation Section 2 2 ...
Страница 244: ...216 Axis Operating Input Memory Areas Section 4 8 ...
Страница 264: ...236 Transferring Servo Parameters Section 5 3 ...
Страница 396: ...368 Linear Interpolation Section 9 7 ...
Страница 648: ...620 List of Error Codes Appendix D ...
Страница 674: ...646 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Страница 684: ...656 Index ...
Страница 686: ...658 Revision History ...







































































