





























125
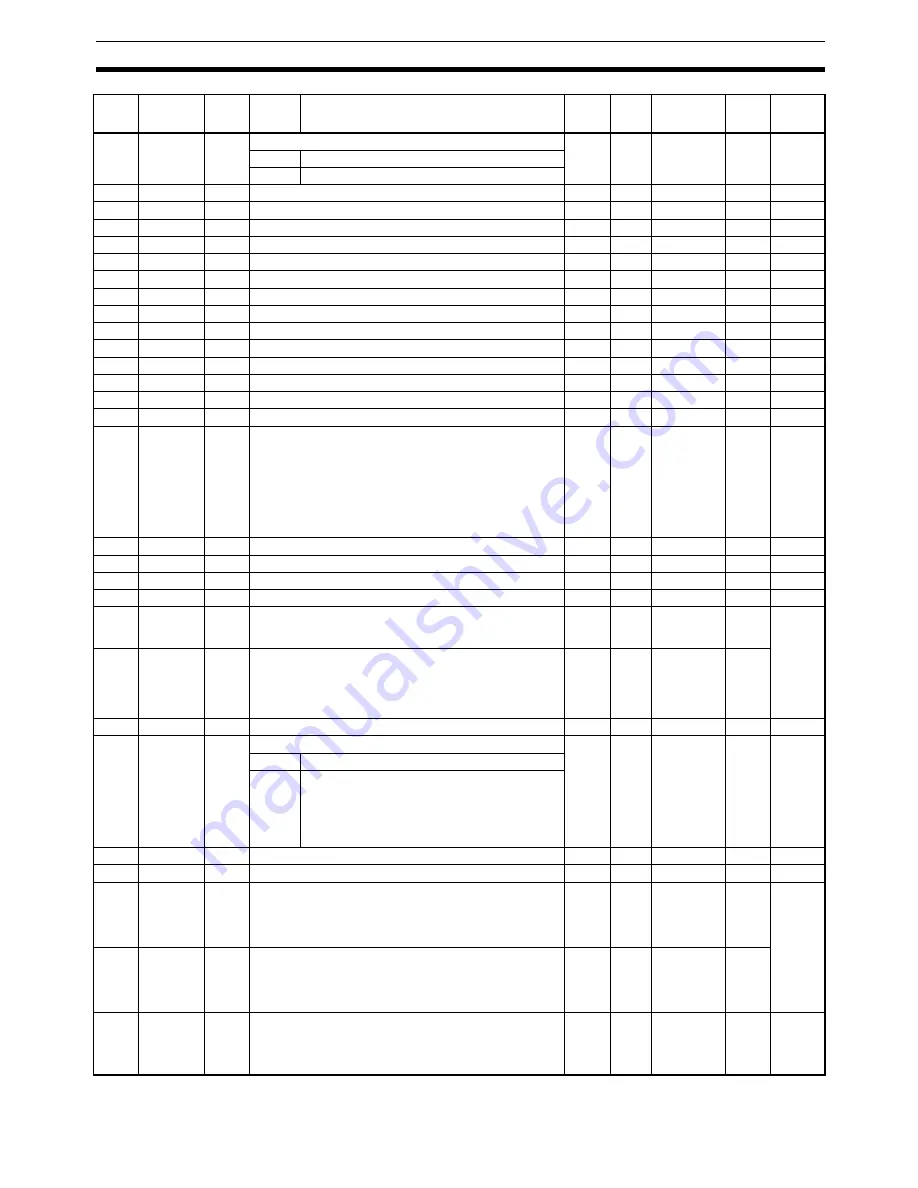
Servo Parameter Area
Section 4-5
Pn044
Input Sig-
nal Selec-
tion
2
Sets the terminal assignment for Drive Prohibit Input.
1
---
0, 1
Offline
0
Sets CN1 pin 19 to POT, CN1 pin 20 to NOT.
1
Sets CN1 pin 19 to NOT, CN1 pin 20 to POT.
Pn045
Reserved
---
Do not change.
0
---
---
---
Pn046
Reserved
---
Do not change.
0
---
---
---
Pn047
Reserved
---
Do not change.
0
---
---
---
Pn048
Reserved
---
Do not change.
0
---
---
---
Pn049
Reserved
---
Do not change.
0
---
---
---
Pn04A
Reserved
---
Do not change.
0
---
---
---
Pn04B
Reserved
---
Do not change.
0
---
---
---
Pn04C
Reserved
---
Do not change.
0
---
---
---
Pn04D
Reserved
---
Do not change.
0
---
---
---
Pn04E
Reserved
---
Do not change.
0
---
---
---
Pn04F
Reserved
---
Do not change.
0
---
---
---
Pn050
Reserved
---
Do not change.
0
---
---
---
Pn051
Reserved
---
Do not change.
0
---
---
---
Pn052
Reserved
---
Do not change.
0
---
---
---
Pn053
Speed Limit
2
Sets the speed limit for torque control mode. (The value is an
absolute value)
This parameter is limited by the Overspeed Detection Level Set-
ting (Pn073).
50
r/min
−
20000 to
20000
Online
Settings
can be
changed
when the
axes are
stopped
(Busy
Flag for
each axis
= 0).
Pn054
Reserved
---
Do not change.
0
---
---
---
Pn055
Reserved
---
Do not change.
0
---
---
---
Pn056
Reserved
---
Do not change.
0
---
---
---
Pn057
Reserved
---
Do not change.
0
---
---
---
Pn058
Soft Start
Accelera-
tion Time
2
Sets the acceleration time for speed control mode.
Acceleration time [s] from 0 r/min to maximum speed [r/min] = Set
value
×
2 ms
0
×
2 ms
0 to 5000
Online
Settings
can be
changed
when the
axes are
stopped
(Busy
Flag for
each axis
= 0).
Pn059
Soft Start
Decelera-
tion Time
2
Sets the deceleration time for speed control mode.
Deceleration time [s] from maximum speed [r/min] to 0 r/min = Set
value
×
2 ms
0
×
2 ms
0 to 5000
Online
Pn05A
Reserved
---
Do not change.
0
---
---
---
Pn05B
2
Selects the speed limit for torque control mode.
0
---
0, 1
Online
Settings
can be
changed
when the
axes are
stopped
(Busy
Flag for
each axis
= 0).
0
Use the Speed Limit (Pn053)
1
Use the speed limit value via MECHATROLINK-II or the
Speed Limit (Pn053), whichever is smaller.
Pn05C
Reserved
---
Do not change.
0
---
---
---
Pn05D
Reserved
---
Do not change.
0
---
---
---
Pn05E
No. 1
Torque
Limit
2
Sets the No. 1 Torque Limit for the Servomotor output torque.
Refer to information on the Torque Limit Selection (Pn003) to
select the torque limit.
The maximum value of the setting range depends on the applica-
ble Servomotor.
300
%
0 to 500
Online
Settings
can be
changed
when the
axes are
stopped
(Busy
Flag for
each axis
= 0).
Pn05F
No. 2
Torque
Limit
2
Sets the No. 2 torque limit for the Servomotor output torque.
Refer to information on the Torque Limit Selection (Pn003) to
select the torque limit.
The maximum value of the setting range depends on the applica-
ble Servomotor.
100
%
0 to 500
Online
Pn060
Positioning
Completion
Range 1
2
Sets the positioning completion range when Positioning Comple-
tion 1 (INP1) Output is selected.
Positioning is complete when all positioning command pulses are
exhausted, and the absolute value of the position deviation con-
verted into command units is less than this setting.
25
Com-
mand
units
0 to 10000
Online
Param-
eter
No.
Parameter
name
Param-
eter
size
Setting
Explanation
Default
setting
Unit
Setting
range
Enable
setting
Details
Содержание CJ1W-NC271 - 12-2009
Страница 2: ......
Страница 4: ...iv ...
Страница 6: ...vi ...
Страница 22: ...xxii ...
Страница 58: ...30 Starting Operation Section 2 2 ...
Страница 244: ...216 Axis Operating Input Memory Areas Section 4 8 ...
Страница 264: ...236 Transferring Servo Parameters Section 5 3 ...
Страница 396: ...368 Linear Interpolation Section 9 7 ...
Страница 648: ...620 List of Error Codes Appendix D ...
Страница 674: ...646 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Страница 684: ...656 Index ...
Страница 686: ...658 Revision History ...







































































