





























113
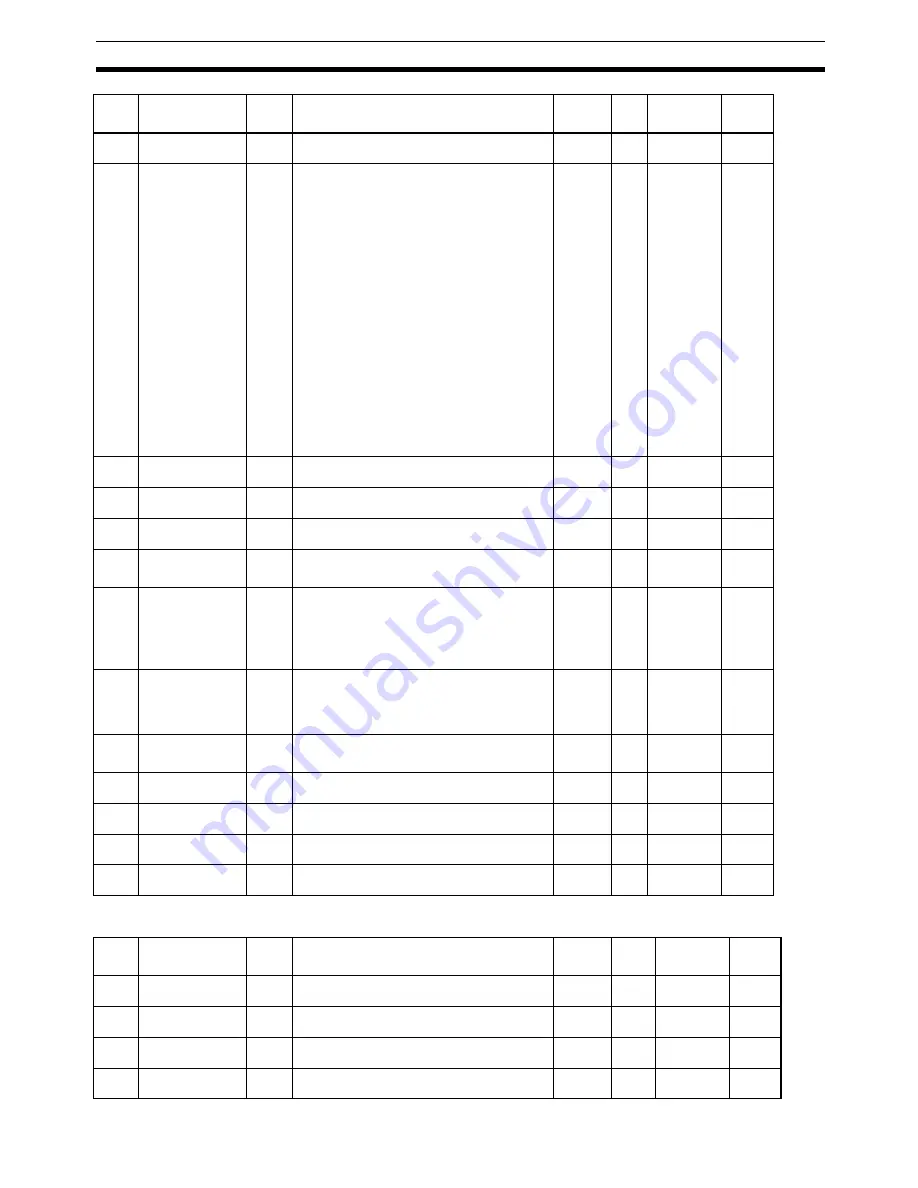
Servo Parameter Area
Section 4-5
Special Parameters 1
509
(509)
Momentary Hold
Time
2
Set the main power supply alarm detection time.
70
1ms
70 to 2000
C
510
(50A)
Stop Selection for
Alarm Detection
2
Select the stopping method at an alarm.
0: During deceleration: Dynamic brake
After stopping: Dynamic brake
1: During deceleration: Free-run
After stopping: Dynamic brake
2: During deceleration: Dynamic brake
After stopping: Servo free
3: During deceleration: Free-run
After stopping: Servo free
4: During deceleration due to emergency stop alarm:
Emergency stop
During deceleration: Dynamic brake
After stopping: Dynamic brake
5: During Emergency stop alarm deceleration: Emer-
gency stop
During deceleration: Free-run
After stopping: Dynamic brake
6: During Emergency stop alarm deceleration: Emer-
gency stop
During deceleration: Dynamic brake
After stopping: Servo free
7: During Emergency stop alarm deceleration: Emer-
gency stop
During deceleration: Free-run
After stopping: Servo free
0
-
0 to 7
B
511
(50B)
Emergency Stop
Torque
2
Set the torque limit for emergency stops.
0
%
0 to 500
B
512
(50C)
Overload Detection
Level Setting
2
Set the overload detection level.
0
%
0 to 500
A
513
(50D)
Overspeed Detec-
tion Level Setting
2
Set the overspeed error detection level.
0
r/min
0 to 20000
A
514
(50E)
Overrun Limit Setting
2
Set the motor over-travel distance for position com-
mands.
10
0.1
rota-
tion
0 to 1000
A
515
(50F)
Control Input Signal
Read Setting
2
Select the cycle to read the control input signals from
the four levels.
0: 0.166 ms
1: 0.333 ms
2: 1 ms
3: 1.666 ms
0
-
0 to 3
C
520
(514)
Position Setting Unit
Selection
2
Select the setting units of Positioning Completion
Range 1 and 2 (Pn431 and Pn442) and of the Error
Counter Overflow Level (Pn014).
0: Command unit
1: Encoder unit
0
-
0 to 1
C
521
(515)
Torque Limit Selec-
tion
2
Select the method to set the forward and reverse
torque limits, and the torque feed forward function dur-
ing speed control.
1
-
0 to 6
B
522
(516)
No. 2 Torque Limit
2
Set the No. 2 limit value for the motor output torque.
0
%
0 to 500
B
525
(519)
Forward External
Torque Limit
2
Set the forward external toque limit when the torque
limit switch input is given.
0
%
0 to 500
B
526
(51A)
Reverse External
Torque Limit
2
Set the reverse external toque limit when the torque
limit switch input is given.
0
%
0 to 500
B
531
(51F)
Axis Number
2
Set the axis number for communication.
1
-
0 to 127
C
Param-
eter
No.
Parameter name
Param-
eter
size
Explanation
Default
setting
Unit
Setting
range
Data
attribute
Param-
eter
No.
Parameter name
Param-
eter
size
Explanation
Default
setting
Unit
Setting
range
Data
attribute
605
(605)
Gain 3 Effective Time 2
Set effective time of gain 3 of three-step gain switch-
ing.
0
0.1ms
0 to 10000
B
606
(606)
Gain 3 Ratio Setting
2
Set gain 3 as a multiple of gain 1.
100
%
50 to 1000
B
607
(607)
Torque Command
Value Offset
2
Set offset torque to add to torque command.
0
%
-100 to 100
B
608
(608)
Forward Direction
Torque Offset
2
Set the value to add to a torque command for forward
direction operation.
0
%
-100 to 100
B
Содержание CJ1W-NC271 - 12-2009
Страница 2: ......
Страница 4: ...iv ...
Страница 6: ...vi ...
Страница 22: ...xxii ...
Страница 58: ...30 Starting Operation Section 2 2 ...
Страница 244: ...216 Axis Operating Input Memory Areas Section 4 8 ...
Страница 264: ...236 Transferring Servo Parameters Section 5 3 ...
Страница 396: ...368 Linear Interpolation Section 9 7 ...
Страница 648: ...620 List of Error Codes Appendix D ...
Страница 674: ...646 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Страница 684: ...656 Index ...
Страница 686: ...658 Revision History ...







































































