





























468
Application Examples
Section 11-3
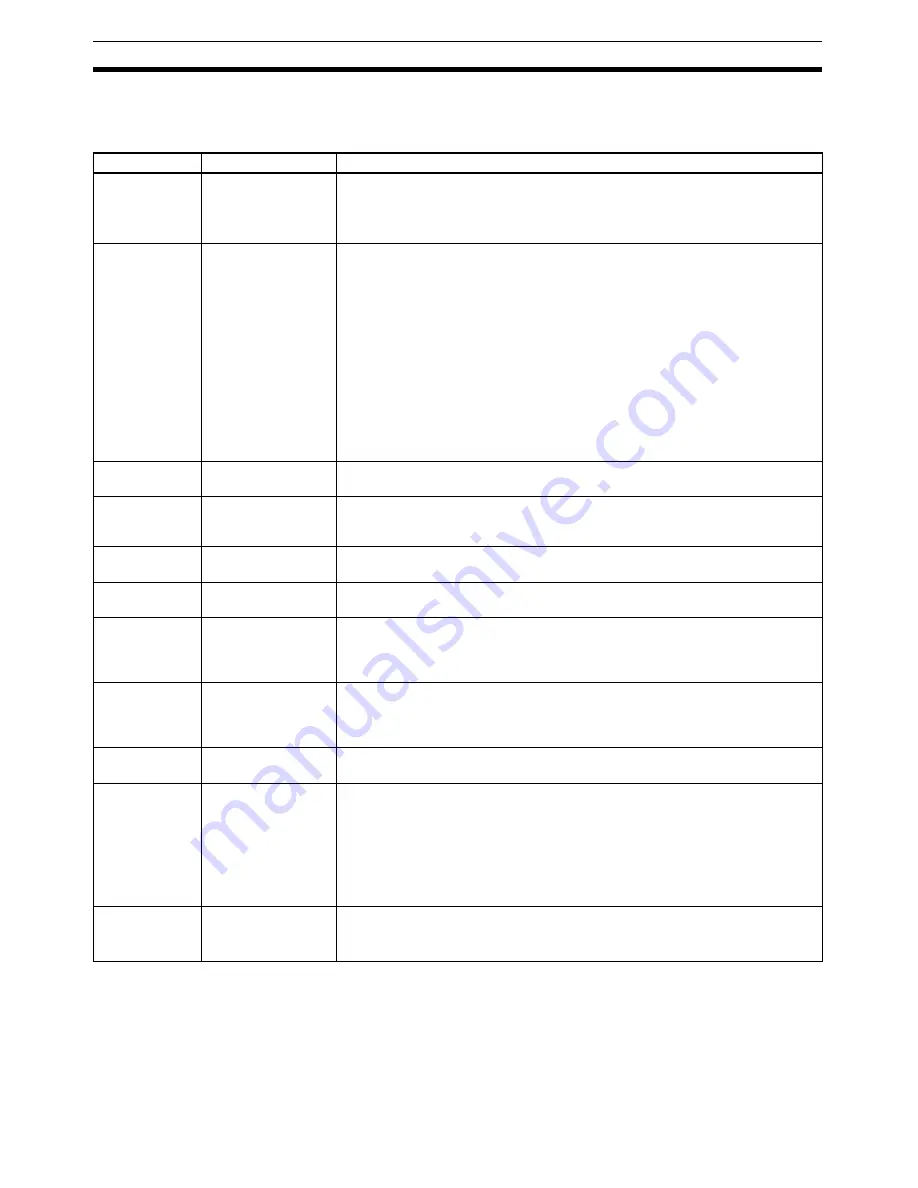
The following table shows the axis 1 operations that can be started by this
program as well as the I/O bit operations and command values (in the DM
Area), which start that axis 1 operation.
Word/bit
Function
Explanation
CIO 050000
Axis 1 Servo Lock/
Unlock Switch
Each time this bit is turned ON, it switches axis 1 between Servo Lock and Servo
Unlock.
When the Servo Unlock is executed during speed control or torque control, the
Servo Unlock is executed after executing an Emergency Stop.
CIO 050001
Start Axis 1 Position-
ing
When this bit goes from OFF to ON, positioning starts according to the position
command value in D1000 and D1001 or the speed command value in D1002
and D1003.
The positioning method can be switched between absolute/relative movement by
turning H1.00 ON/OFF.
H1.00 ON: ABSOLUTE MOVEMENT
H1.00 OFF: RELATIVE MOVEMENT
Also, the acceleration constant (deceleration constant) can be set to the value in
D1010 (D1011) before starting the positioning operation if CIO 0500.14 (CIO
0500.15) is turned ON before turning this bit from OFF to ON.
When positioning is started with CIO 0500.14 and/or CIO 0500.15 OFF, position-
ing will be performed with the acceleration constant and/or deceleration constant
set in the Servo Drive.
CIO 050002
Start Axis 1 Speed
Control
When this bit goes from OFF to ON, speed control starts according to the speed
command value in D1002 and D1003.
CIO 050003
Start Axis 1 Torque
Control
When this bit goes from OFF to ON, torque control starts according to the torque
command value in D1004 and D1005, with the speed command value in D1002
and D1003 as the speed limit value.
CIO 050004
Start Axis 1 Deceler-
ation Stop
A Deceleration Stop is executed when this bit goes from OFF to ON.
CIO 050005
Start Axis 1 Emer-
gency Stop
An Emergency Stop is executed when this bit goes from OFF to ON.
CIO 050014
Specify Axis 1 Accel-
eration Constant
If CIO 0500.01 (Axis 1 Start Positioning) is turned from OFF to ON while this bit
is ON, positioning will be executed with the acceleration constant specified in
D1010. (Before positioning is started, the new constant is written to the acceler-
ation constant Servo Parameter.)
CIO 050015
Specify Axis 1
Deceleration Con-
stant
If CIO 0500.01 (Axis 1 Start Positioning) is turned from OFF to ON while this bit
is ON, positioning will be executed with the deceleration constant specified in
D1011. (Before positioning is started, the new constant is written to the deceler-
ation constant Servo Parameter.)
D1000
D1001
Axis 1 Position Com-
mand Value
These words contain the position command value used in positioning. Set in the
“command units.”
D1002
D1003
Axis 1 Speed Com-
mand Value
These words contain the speed command value used in positioning and speed
control.
This value is also used as the speed limit value during torque control.
Set in “command units/s.”
Speed command value for speed control and speed limit value for torque control
are calculated in this program from this set value and the Servomotor's momen-
tary maximum rotation speed, encoder resolution, and electronic gear ratio.
D1004
D1005
Axis 1 Torque Com-
mand Value
This is the torque command value used in torque control.
Set the torque command value as a percentage of the Servomotor's momentary
maximum torque, in units of 0.001%.
Содержание CJ1W-NC271 - 12-2009
Страница 2: ......
Страница 4: ...iv ...
Страница 6: ...vi ...
Страница 22: ...xxii ...
Страница 58: ...30 Starting Operation Section 2 2 ...
Страница 244: ...216 Axis Operating Input Memory Areas Section 4 8 ...
Страница 264: ...236 Transferring Servo Parameters Section 5 3 ...
Страница 396: ...368 Linear Interpolation Section 9 7 ...
Страница 648: ...620 List of Error Codes Appendix D ...
Страница 674: ...646 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Страница 684: ...656 Index ...
Страница 686: ...658 Revision History ...







































































