





























322
Origin Return
Section 8-4
Axis Operating Output Memory Areas (Operating Commands)
a = Beginning word of Axis Operating Output Areas specified in Common
Para (Axis No.
−
1)
×
25
Origin return is performed according to the speed command value set in the
Axis Operating Output Memory Areas and started when the ORIGIN
RETURN Bit turns ON.
Execute ORIGIN RETURN when the Busy Flag for the corresponding axis is
OFF. If ORIGIN RETURN is executed while the axis's Busy Flag is ON, a Mul-
tistart Error (axis error code: 3050) will occur and ORIGIN RETURN will not
be executed. When starting ORIGIN RETURN, make sure that the ORIGIN
RETURN Bit will remain ON until the Busy Flag turns ON.
If the SERVO UNLOCK, DEVIATION COUNTER RESET, EMERGENCY
STOP, OR DECELERATION STOP command bit is turned ON, the ORIGIN
RETURN command will be ignored. Be sure that all of these command bits
are OFF before executing an origin return.
The target speed for an origin return operation can be changed while ORIGIN
RETURN is being executed by setting the new speed command value in the
Axis Operating Output Memory Area. (For details on changing the target
speed, which is the same as positioning operations, refer to
9-4-4 Changing
Target Speed
.)
Torque limit during operation is possible with origin return operations. For fur-
ther details on the torque limit function, refer to
10-4 Torque Limits
.
The acceleration/deceleration curve designation, and forward/reverse rotation
current limit designation data are enabled when the ORIGIN RETURN Bit
turns ON.
The SMARTSTEP Junior Servo Drives do not support acceleration/decelera-
tion filters and torque limits. When using a SMARTSTEP Junior Servo Drive,
do not attempt to use an acceleration/deceleration curve designation or for-
ward/reverse torque limit designation.
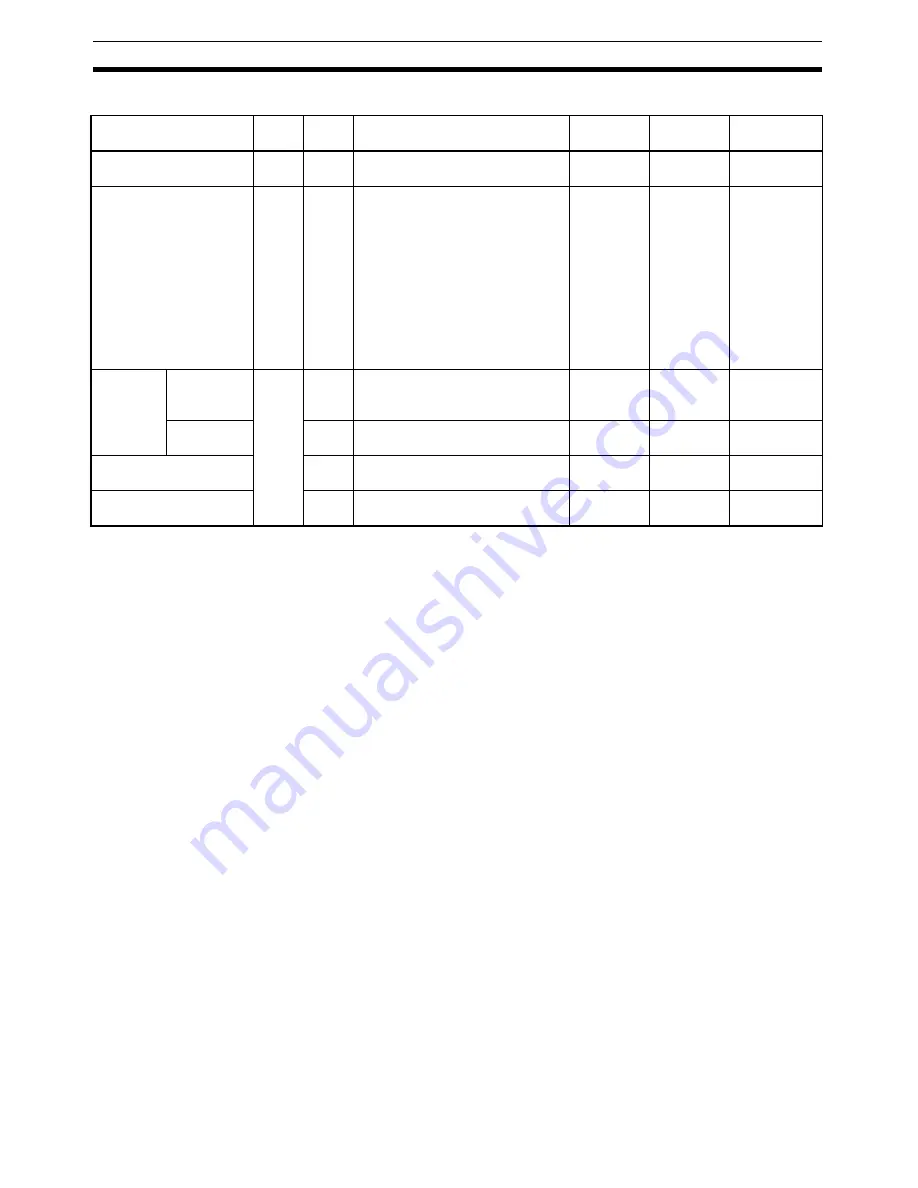
Name
Word
Bits
Contents
G Series
W Series
SMARTSTEP
Junior
ORIGIN RETURN Bit
a
07
0
→
1: Starts origin return opera-
tion
Supported
Supported
Supported
Speed command value
a+4
a+5
---
Speed command value (rightmost
word)
Speed command value (leftmost
word)
Unit: Command units/s
Command range: 1 to
2,147,483,647 (00000000 hex to
7FFFFFFF hex)
The upper limit setting for the
speed command value depends
on the Servo Drive specifications.
Supported
Supported
Supported
Accelera-
tion/decel-
eration
curve des-
ignation
Exponential
curve desig-
nation
a+16
03
1: Use exponential acceleration/
deceleration curve.
Not sup-
ported
Supported
Not sup-
ported
S-curve des-
ignation
04
1: Use S-curve acceleration/decel-
eration curve.
Supported
Supported
Not sup-
ported
Forward rotation current
limit
14
1: Use forward torque limit
Supported
Supported
Not sup-
ported
Reverse rotation current
limit
15
1: Use reverse torque limit
Supported
Supported
Not sup-
ported
Содержание CJ1W-NC271 - 12-2009
Страница 2: ......
Страница 4: ...iv ...
Страница 6: ...vi ...
Страница 22: ...xxii ...
Страница 58: ...30 Starting Operation Section 2 2 ...
Страница 244: ...216 Axis Operating Input Memory Areas Section 4 8 ...
Страница 264: ...236 Transferring Servo Parameters Section 5 3 ...
Страница 396: ...368 Linear Interpolation Section 9 7 ...
Страница 648: ...620 List of Error Codes Appendix D ...
Страница 674: ...646 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Страница 684: ...656 Index ...
Страница 686: ...658 Revision History ...







































































