








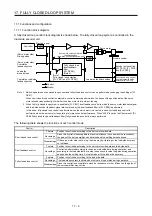
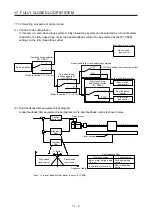
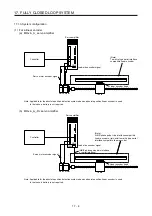














17. FULLY CLOSED LOOP SYSTEM
17 - 6
17.2 Load-side encoder
POINT
Always use the load-side encoder cable introduced in this section. Using other
products may cause a malfunction.
For details of the load-side encoder specifications, performance and assurance,
contact each encoder manufacturer.
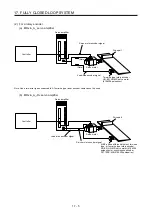
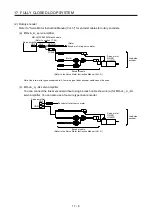
17.2.1 Linear encoder
Refer to "Linear Encoder Instruction Manual" for usable linear encoders.
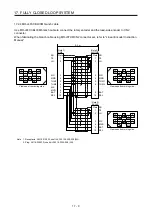
17.2.2 Rotary encoder
When a rotary encoder is used for the load-side encoder, use HG-KR or HG-MR servo motor as an encoder.
Use a two-wire type encoder cable for MR-J4-_A_ servo amplifiers. Do not use MR-EKCBL30M-L, MR-
EKCBL30M-H, MR-EKCBL40M-H, or MR-EKCBL50M-H as they are four-wire type.
Summary of Contents for MR-J4-100A(-RJ)
Page 19: ...10 MEMO ...
Page 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Page 83: ...2 INSTALLATION 2 8 MEMO ...
Page 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Page 203: ...4 STARTUP 4 44 MEMO ...
Page 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Page 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
Page 387: ...9 DIMENSIONS 9 22 MEMO ...
Page 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Page 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Page 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Page 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Page 856: ...APPENDIX App 41 ...
Page 905: ...MEMO ...







































































