




























8. TROUBLESHOOTING
8 - 10
No. Name
Detail
No.
Detail name
Stop
Type
(Note 2,
3)
Alarm
deactivation
Alarm code
Alarm
reset
Cycling
the
power
ACD3
(Bit 3)
ACD2
(Bit 2)
ACD1
(Bit 1)
ACD0
(Bit 0)
Alarm
8E
USB communication
error/serial
communication
error/Modbus RTU
communication error
8E.1
USB communication receive
error/Serial communication
receive error
SD
0 0 0 0
8E.2
USB communication checksum
error/Serial communication
checksum error
SD
8E.3
USB communication character
error/serial communication
character error
SD
8E.4
USB communication command
error/Serial communication
command error
SD
8E.5
USB communication data
number error/Serial
communication data number
error
SD
8E.6
Modbus RTU communication
receive error
SD
8E.7
Modbus RTU communication
message frame error
SD
8E.8
Modbus RTU communication
CRC error
SD
88888
Watchdog
8888._
Watchdog
DB
Note 1. After resolving the source of trouble, cool the equipment for approximately 30 minutes.
2. The following shows three stop methods of DB, EDB, and SD.
DB: Stops with dynamic brake. (Coasts for the servo amplifier without dynamic brake.)
Coasts for MR-J4-03A6(-RJ).
Note that EDB is applied when an alarm below occurs:
[AL. 30.1], [AL. 32.2], [AL. 32.4], [AL. 51.1], [AL. 51.2]
EDB: Electronic dynamic brake stop (available with specified servo motors)
Refer to the following table for the specified servo motors. The stop method for other than the specified servo motors will
be DB.
Series
Servo
motor
HG-KR HG-KR053/HG-KR13/HG-KR23/HG-KR43
HG-MR HG-MR053/HG-MR13/HG-MR23/HG-MR43
HG-SR HG-SR51/HG-SR52
HG-AK
HG-AK0136/HG-AK0236/HG-AK0336
SD: Forced stop deceleration
3. This is applicable when [Pr. PA04] is set to the initial value. The stop system of SD can be changed to DB using [Pr. PA04].
4. The alarm can be canceled by setting as follows:
For the fully closed loop control: set [Pr. PE03] to "1 _ _ _".
When a linear servo motor or direct drive motor is used: set [Pr. PL04] to "1 _ _ _".
5. Reset this while all the safety observation functions are stopped.
6. This alarm will occur only in the J3 compatibility mode.
Summary of Contents for MR-J4-100A(-RJ)
Page 19: ...10 MEMO ...
Page 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Page 83: ...2 INSTALLATION 2 8 MEMO ...
Page 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Page 203: ...4 STARTUP 4 44 MEMO ...
Page 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Page 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
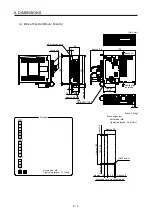
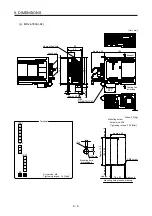
Page 387: ...9 DIMENSIONS 9 22 MEMO ...
Page 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Page 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Page 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Page 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Page 856: ...APPENDIX App 41 ...
Page 905: ...MEMO ...







































































