





















3. SIGNALS AND WIRING
3 - 68
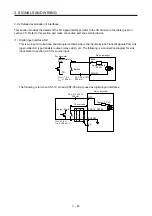
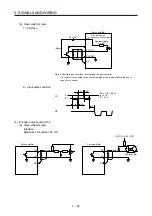
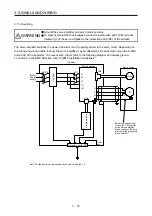
(2) Digital output interface DO-1
This is a circuit in which the emitter side of the output transistor is the output terminal. When the output
transistor is turned on, the current flows from the output terminal to a load.
A maximum of 2.6 V voltage drop occurs in the servo amplifier.
(Note) 24 V DC ± 10%
500 mA
Servo amplifier
ALM
etc.
DOCOM
Load
If polarity of diode is
reversed, servo amplifier
will malfunction.
Note. If the voltage drop (maximum of 2.6 V) interferes with the relay operation, apply high
voltage (maximum of 26.4 V) from external source.
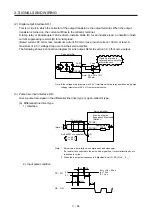
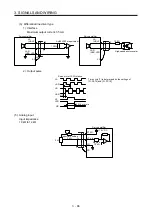
(3) Pulse train input interface DI-2
Give a pulse train signal in the open-collector type.
1) Interface
Max. input pulse
frequency 200 kpulses/s
Approx.
1.2 k
Ω
Approx.
1.2 k
Ω
Servo amplifier
PP2
PG
V
CES
≤
1.0 V
I
CEO
≤
100
μ
A
(Note)
Approx. 20 mA
Approx. 20 mA
(Note)
NP2
SD
NG
V
CES
≤
1.0 V
I
CEO
≤
100
μ
A
24 V DC ± 10%
500 mA
Note. Pulse train input interface is comprised of a photocoupler.
If a resistor is connected to the pulse train signal line, it may malfunction due to
reduction in current.
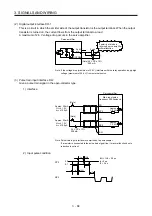
2) Input pulse condition
0.9
0.1
tc
tLH
tc
tHL
tF
PP2
NP2
tLH = tHL < 0.2 µs
tc > 2 µs
tF > 3 µs
Summary of Contents for MR-J4-100A(-RJ)
Page 19: ...10 MEMO ...
Page 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Page 83: ...2 INSTALLATION 2 8 MEMO ...
Page 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Page 203: ...4 STARTUP 4 44 MEMO ...
Page 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Page 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
Page 387: ...9 DIMENSIONS 9 22 MEMO ...
Page 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Page 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Page 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Page 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Page 856: ...APPENDIX App 41 ...
Page 905: ...MEMO ...







































































