


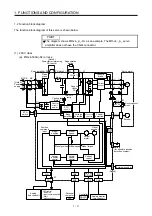

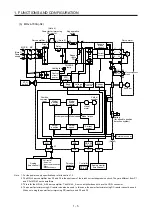
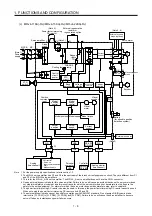
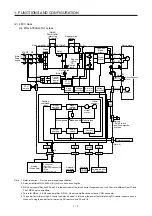
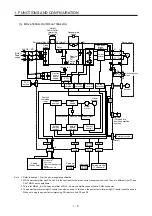
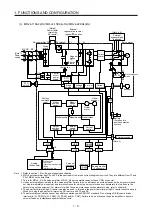
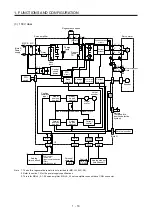














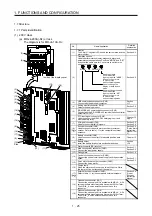




1. FUNCTIONS AND CONFIGURATION
1 - 14
(2) 400 V class
Model:
MR-J4-_(-RJ)
60A4 100A4 200A4 350A4 500A4 700A4 11KA4 15KA4 22KA4
Output
Rated voltage
3-phase 323 V AC
Rated
current
[A]
1.5 2.8 5.4 8.6 14.0
17.0
32.0 41.0 63.0
Main circuit
power supply
input
Voltage/Frequency
3-phase 380 V AC to 480 V AC, 50 Hz/60 Hz
Rated
current
[A]
1.4 2.5 5.1 7.9 10.8
14.4
23.1 31.8 47.6
Permissible voltage
fluctuation
3-phase 323 V AC to 528 V AC
Permissible frequency
fluctuation
Within
±5%
Power supply
capacity
[kVA]
Refer to section 10.2.
Inrush current
[A]
Refer to section 10.5.
Voltage/Frequency
1-phase 380 V AC to 480 V AC, 50 Hz/60 Hz
Rated
current
[A]
0.1
0.2
Control circuit
power supply
input
Permissible voltage
fluctuation
1-phase 323 V AC to 528 V AC
Permissible frequency
fluctuation
Within
±5%
Power
consumption
[W]
30
45
Inrush
current
[A]
Refer to section 10.5.
Interface power
supply
Voltage
24 V DC ± 10%
Current capacity
[A]
0.5 (including CN8 connector signals) (Note 1)
Control method
Sine-wave PWM control, current control method
Dynamic brake
Built-in
External option (Note 6, 7)
Fully closed loop control
Compatible
Load-side encoder interface (Note 5)
Mitsubishi Electric high-speed serial communication
Communication function
USB: connection to a personal computer or others (MR Configurator2-compatible)
RS-422/RS-485: 1: n communication (up to 32 axes) (Note 8)
Encoder output pulses
Compatible (A/B/Z-phase pulse)
Analog monitor
Two channels
Position control
mode
Max. input pulse frequency
4 Mpulses/s (for differential receiver) (Note 4), 200 kpulses/s (for open collector)
Positioning feedback pulse
Encoder resolution (resolution per servo motor revolution): 22 bits
Command pulse multiplying
factor
Electronic gear A:1 to 16777215, B:1 to 16777215, 1/10 < A/B < 4000
In-position range setting
0 pulse to ±65535 pulses (command pulse unit)
Error excessive
±3 revolutions
Torque limit
Set by parameter setting or external analog input (0 V DC to +10 V DC/maximum torque)
Speed control
mode
Speed control range
Analog speed command 1: 2000, internal speed command 1: 5000
Analog speed command
input
0 to ±10 V DC/rated speed (The speed at 10 V is changeable with [Pr. PC12].)
Speed fluctuation ratio
±0.01% or less (load fluctuation 0 % to 100%), 0% (power fluctuation ±10%), ±0.2% or less (ambient
temperature 25 ± 10 °C) when using analog speed command
Torque limit
Set by parameter setting or external analog input (0 V DC to +10 V DC/maximum torque)
Torque control
mode
Analog torque command
input
0 V DC to ±8 V DC/maximum torque (input impedance 10 k
Ω
to 12 k
Ω
)
Speed limit
Set by parameter setting or external analog input (0 V DC to 10 V DC/rated speed)
Positioning mode
Refer to "MR-J4-_A_-RJ Servo Amplifier Instruction Manual (Positioning Mode)" section 1.1.
The positioning mode is used by MR-J4-_A_-RJ servo amplifier with software version B3 or later.
Protective functions
Overcurrent shut-off, regenerative overvoltage shut-off, overload shut-off (electronic thermal),
servo motor overheat protection, encoder error protection, regenerative error protection,
undervoltage protection, instantaneous power failure protection, overspeed protection,
error excessive protection, magnetic pole detection protection, and linear servo control fault protection
Functional safety
STO (IEC/EN 61800-5-2)
Summary of Contents for MR-J4-100A(-RJ)
Page 19: ...10 MEMO ...
Page 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Page 83: ...2 INSTALLATION 2 8 MEMO ...
Page 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Page 203: ...4 STARTUP 4 44 MEMO ...
Page 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Page 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
Page 387: ...9 DIMENSIONS 9 22 MEMO ...
Page 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Page 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Page 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Page 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Page 856: ...APPENDIX App 41 ...
Page 905: ...MEMO ...







































































