























16. USING A DIRECT DRIVE MOTOR
16 - 19
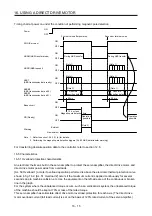
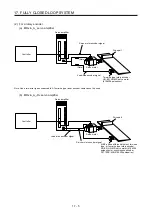
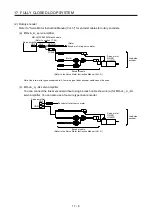
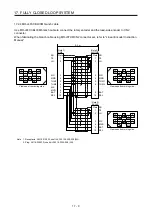
(b) Dynamic brake time constant
The following shows necessary dynamic brake time constant
τ
for equation 16.1.
Speed [r/min]
0
0
100
200
5
15
20
25
30
300
400
500
006
004
10
002
T
ime constant
τ
[ms]
0
0
100
200
70
300
400
500
012
006
018
10
20
30
40
50
60
Speed [r/min]
T
im
e c
onst
ant
τ
[ms]
TM-RFM_C20 TM-RFM_E20
0
0
10
30
40
50
60
20
100
200
300
400
500
Speed [r/min]
072
048
012
T
im
e c
onst
ant
τ
[ms]
0
0
60
50
100
150
200
70
80
50
40
30
20
10
Speed [r/min]
120
040
240
T
ime c
onst
a
nt
τ
[ms]
TM-RFM_G20 TM-RFM_J10
0
0
25
30
20
15
10
5
0
100
200
300
400
500
600
Speed [r/min]
T
ime cons
tant
τ
[ms]
0
0
5
15
20
25
30
10
0
100
200
300
400
500
600
Speed [r/min]
T
ime c
onst
ant
τ
[ms]
TM-RG2M002C30
TM-RU2M002C30
TM-RG2M004E30
TM-RU2M004E30
0
0
60
70
80
50
40
30
20
10
0
100
200
300
400
500
600
Speed [r/min]
T
ime c
onst
a
nt
τ
[ms]
TM-RG2M009G30
TM-RU2M009G30
Summary of Contents for MR-J4-100A(-RJ)
Page 19: ...10 MEMO ...
Page 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Page 83: ...2 INSTALLATION 2 8 MEMO ...
Page 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Page 203: ...4 STARTUP 4 44 MEMO ...
Page 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Page 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
Page 387: ...9 DIMENSIONS 9 22 MEMO ...
Page 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Page 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Page 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Page 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Page 856: ...APPENDIX App 41 ...
Page 905: ...MEMO ...







































































