





























12 Troubleshooting
12 - 20
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
24
00
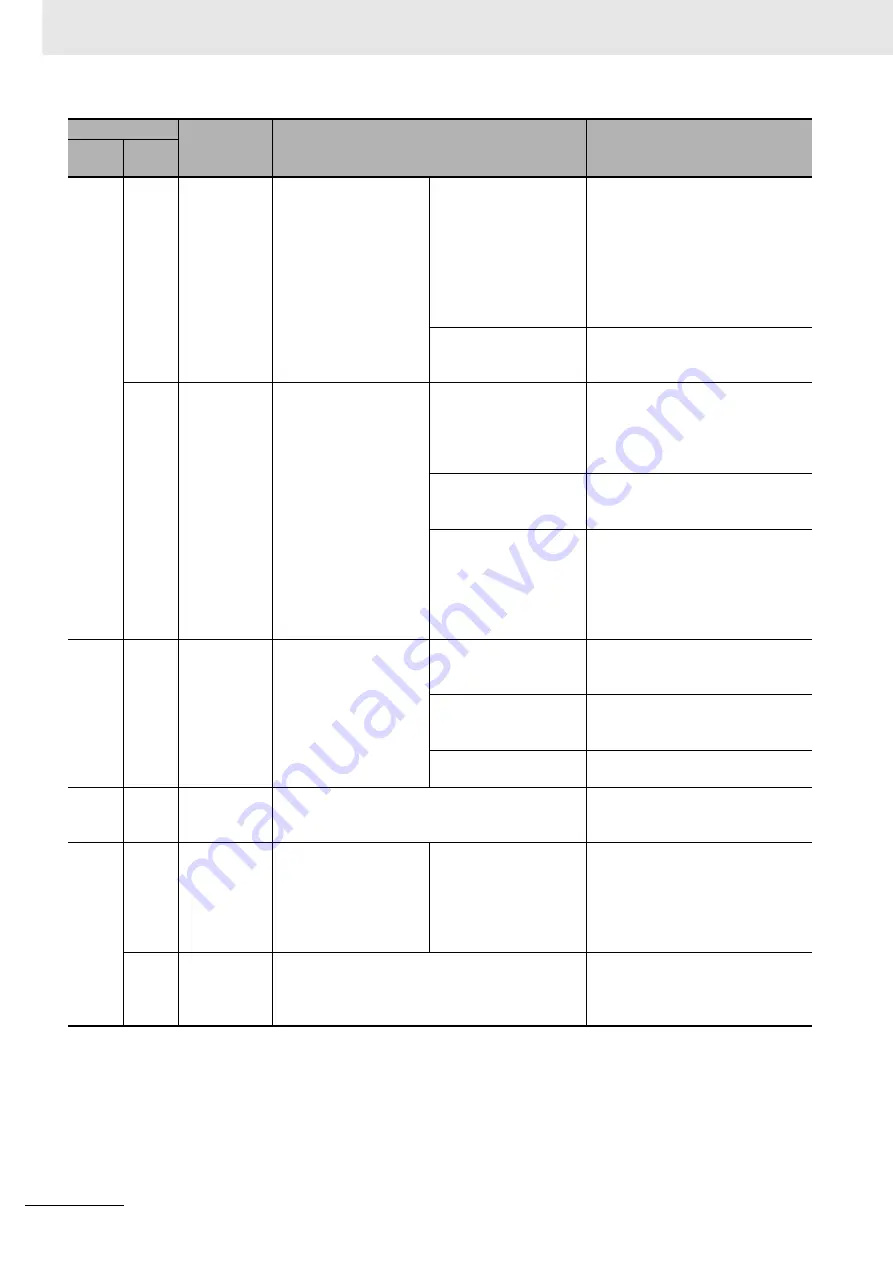
Excessive
Position
Deviation
Error
The position deviation is
greater than or equal to
the value set in the Fol-
lowing error window.
The motor operation
does not follow the com-
mand.
Identify and remove a cause that
limits the motor operation.
During the acceleration/decelera-
tion, the command may not be fol-
lowed depending on operation
patterns. In that case, adjust the
gain, increase the accelera-
tion/deceleration time or the like.
The value of Following
error window is small.
Increase the setting of the Follow-
ing error window to an acceptable
range.
01
Excessive
Speed Devia-
tion Error
The speed deviation is
greater than or equal to
the value set in the
Excessive Velocity
Deviation Detection
Level.
The motor operation
does not follow the com-
mand because a param-
eter value is
inappropriate.
Adjust the gain to improve the fol-
lowing ability. Or, increase the
acceleration/deceleration time for
the internal position command
velocity.
The output axis of motor
is limited on the opera-
tion by external forces.
Take countermeasures so that the
output axis is not limited on the
operation by external forces.
The value of the Exces-
sive Velocity Deviation
Detection Level is inap-
propriate.
Increase the setting of the Exces-
sive Velocity Deviation Detection
Level to an acceptable range. Dis-
able the Excessive Velocity Devia-
tion Detection if it is unnecessary to
monitor the velocity deviation.
26
00
Excessive
Speed Error
The feedback motor
speed is greater than or
equal to the value set in
the Excessive Speed
Detection Level.
The velocity command
value is too large.
Do not give the excessive velocity
command. Check whether the elec-
tronic gear ratio is set correctly.
Overshooting occurred.
If overshooting occurred due to
faulty gain adjustment, adjust the
gain.
The motor is rotated by
external forces.
Check whether the motor is rotated
by external forces.
27
01
Absolute
Value
Cleared
The multi-rotation counter of the absolute encoder
was cleared.
This operation is performed for
safety and is not an error.
28
00
Pulse Output
Overspeed
Error
The speed, which
exceeded the fre-
quency that could be
output by the Encoder
Dividing Pulse Output
function, was detected.
The dividing ratio setting
is inappropriate for the
actual usage condition.
Correct the setting of Encoder
Dividing Pulse Output - Dividing
Denominator and Dividing Numera-
tor.
01
Pulse Output
Setting Error
The dividing numerator exceeded the dividing
denominator when the Encoder Dividing Pulse
Output - Dividing Denominator was set to a value
other than 0.
Correct the setting of Encoder
Dividing Pulse Output - Dividing
Denominator and Dividing Numera-
tor.
Error No.
Name
Cause
Measures
Main
(hex)
Sub
(hex)
Содержание R88D-1SN01H-ECT
Страница 17: ...15 CONTENTS AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 266: ...3 Specifications 3 102 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 430: ...8 Safety Function 8 16 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 568: ...10 Operation 10 10 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 822: ...Appendices A 174 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 823: ...AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586 I 1 I Index...
Страница 826: ...I 4 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586 Appendices...
Страница 827: ......





















































