





























4 - 39
4 Configuration and Wiring
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
4-3 Wiring
Con
fo
rm
ing
to
EMC Directi
ves
4
4-
3-2 Selecting
Connection
Component
This section describes the criteria for selecting connection components that are required to improve
noise immunity.
Thoroughly understand the characteristics such as capacity, performance, and the range of application
of the connection components before you select them.
Consult the manufacturer for details of the parts.
Select a molded case circuit breaker based on the maximum input current and inrush current.
z
Maximum input current
• The momentary maximum output of the Servo Drive is approximately three times as much as the
rated output, and the maximum output duration is three seconds.
Therefore, select a molded case circuit breaker which can operate 10
seconds or more at 300% of
the rated current.
• Select a molded case circuit breaker with a rated current larger than the sum of the effective load
current (when multiple Servo Drives are used). Refer to
Main Circuit and Motor Connections
page 3-9 for the rated current of the power supply input for each motor.
• When you select a molded case circuit breaker, add the current consumption by other devices
such as the Controller.
z
Inrush Current
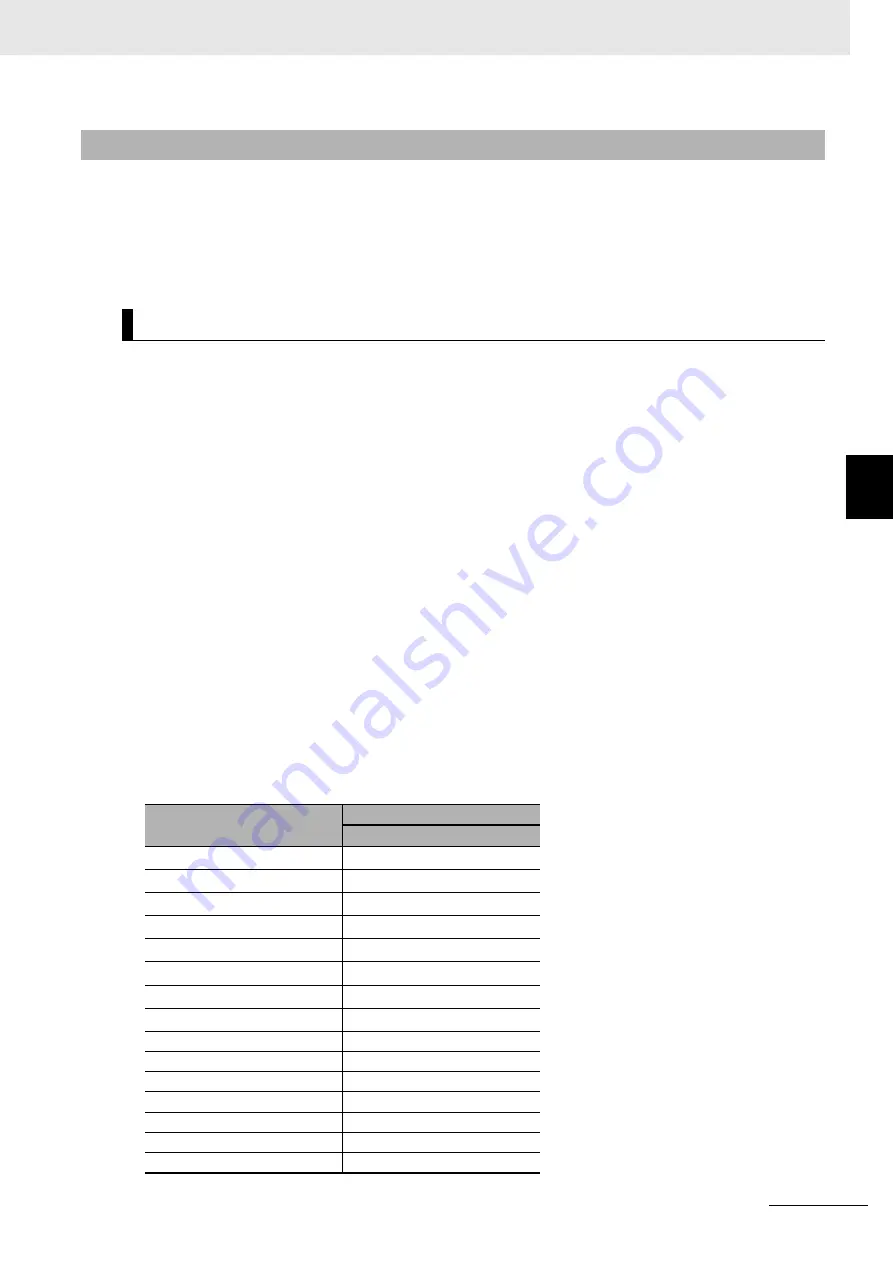
• The following table shows the inrush current of the Servo Drives.
• The amount of inrush current that a low-speed type molded case circuit breaker can flow for 0.02
seconds is approximately 10 times higher than the rated current.
• To turn ON the power supply for multiple Servo Drives simultaneously, select a molded case cir-
cuit breaker whose allowable current in 20 ms is larger than the sum of the inrush currents shown
in the following table.
• The inrush current of the control power supply is limited by the output capacity of the DC power
supply in use.
4-3-2
Selecting Connection Component
Molded Case Circuit Breaker (MCCB)
Servo Drive model
Inrush current (Ao-p)
Main circuit power supply
R88D-1SN01L-ECT
8A
*1
R88D-1SN02L-ECT
8 A
*1
R88D-1SN04L-ECT
8 A
*1
R88D-1SN01H-ECT
16 A
*1
R88D-1SN02H-ECT
16 A
*1
R88D-1SN04H-ECT
16 A
*1
R88D-1SN08H-ECT
16 A
*1
R88D-1SN10H-ECT
16 A
*1
R88D-1SN15H-ECT
29 A
R88D-1SN20H-ECT
29 A
R88D-1SN30H-ECT
29 A
R88D-1SN06F-ECT
32 A
R88D-1SN10F-ECT
32 A
R88D-1SN15F-ECT
32 A
R88D-1SN20F-ECT
32 A
Содержание R88D-1SN01H-ECT
Страница 17: ...15 CONTENTS AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 266: ...3 Specifications 3 102 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 430: ...8 Safety Function 8 16 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 568: ...10 Operation 10 10 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 822: ...Appendices A 174 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 823: ...AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586 I 1 I Index...
Страница 826: ...I 4 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586 Appendices...
Страница 827: ......





















































