





























6 Basic Control Functions
6 - 26
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
Precautions for Correct Use
• Do not rotate the Servomotor at more than 2,147,483,647 [command unit] if the power supply
of NJ/NX-series CPU Unit is OFF when you use the absolute encoder. When the power sup-
ply is turned ON, the CPU Unit cannot restore the present position.
• Do not rotate the Servomotor at more than 2,147,483,647 [command unit] if EtherCAT com-
munications are not established with the NJ/NX-series CPU Unit when you use the absolute
encoder. When communications are established, the CPU Unit cannot restore the present
position.
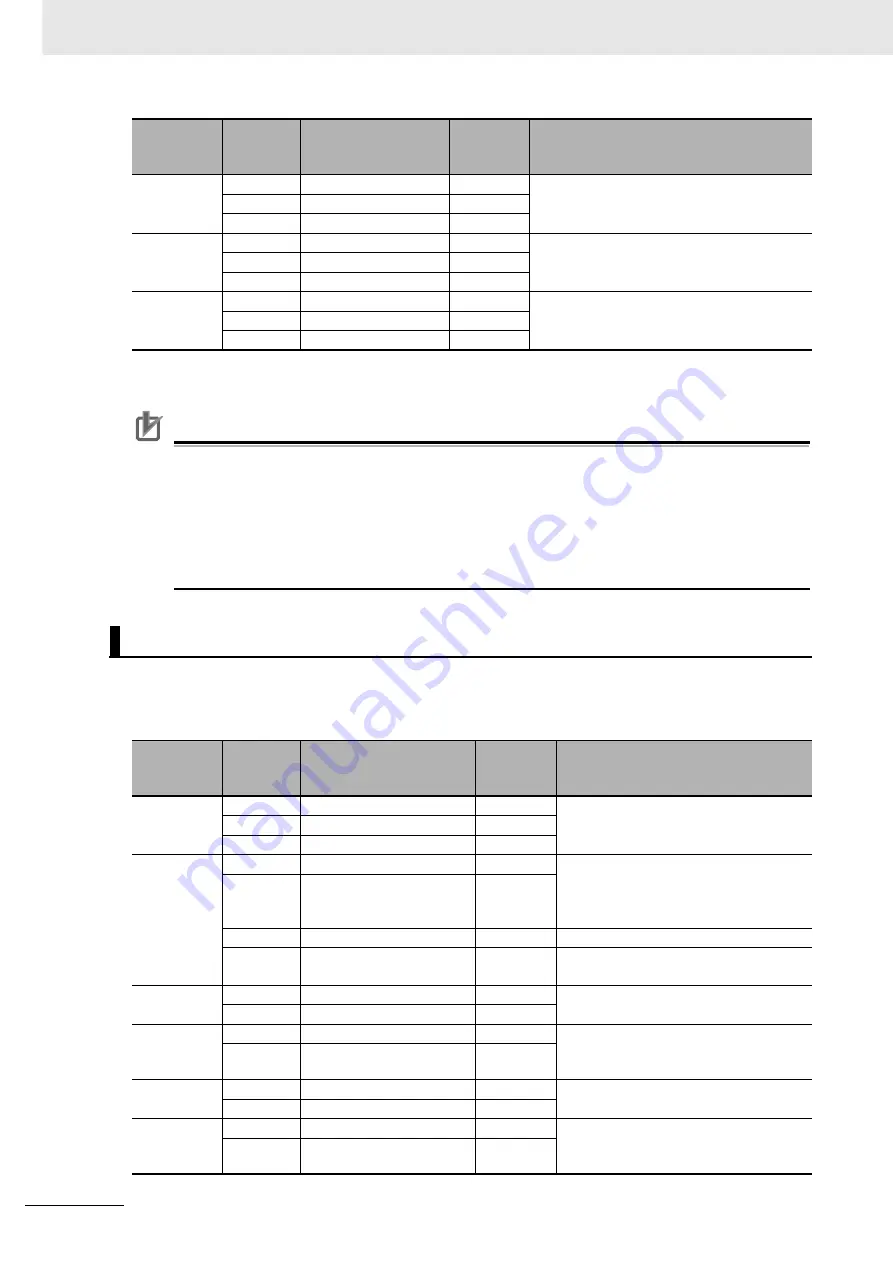
The following table shows the setting values required to use the control functions of the controller.
If you change these settings, read and understand the relevant specifications in advance and set
appropriate values.
4632
---
External Latch Input 1
---
The External Latch Input 1 is allocated to
General Input 7 (IN7) with positive logic (NO
contact).
01
Port Selection
7
02
Logic Selection
0
4633
---
External Latch Input 2
---
The External Latch Input 2 is allocated to
General Input 8 (IN8) with positive logic (NO
contact).
01
Port Selection
8
02
Logic Selection
0
4634
---
Home Proximity Input
---
The Home Proximity Input is allocated to
General Input 4 (IN4) with positive logic (NO
contact).
01
Port Selection
4
02
Logic Selection
0
*1. If the unit version of the NJ/NX-series CPU Units is 1.10 or ealier, some Servomotors cannot be driven at the
maximum rotation speed. In such a case, set the electronig gear ratio of the Servo Drive to 2:1 or higher.
Position Control Unit (Model: CJ1W-NC
8
)
Index (hex)
Subindex
(hex)
Name
Recom-
mended
setting
Description
3001
---
Machine
---
The gear ratio used by the Servo Drive is
8:1, and command units are set by the
controller.
05
Motor Revolutions
8
06
Shaft Revolutions
1
3330
---
Torque Limit
---
If both PCL and NCL are ON, the torque
limit is controlled with the values of 60E0
hex and 60E1 hex that are mapped to a
PDO.
01
Switching Selection
1
05
Positive Torque Limit Value
5,000
Default setting = 500.0%
06
Negative Torque Limit
Value
5,000
Default setting = 500.0%
3A00
---
Homing
---
The value of offset used by the Servo
Drive is
0
.
06
Home Offset
0
3B10
---
Drive Prohibition
---
Drive prohibition input is disabled for the
Servo Drive, and this function is handled
by the controller.
01
Enable
0
3B11
---
Software Position Limit
---
Disabled in both positive and negative
directions.
01
Enable Selection
0
3B30
---
Touch Probe 1
---
Touch probe1 source is set to External
Latch Input 1, and Touch probe 2 source
is set to External Latch Input 2.
01
Touch Probe 1 Source
1
Index (hex)
Subindex
(hex)
Name
Recom-
mended
setting
Description
Содержание R88D-1SN01H-ECT
Страница 17: ...15 CONTENTS AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 266: ...3 Specifications 3 102 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 430: ...8 Safety Function 8 16 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 568: ...10 Operation 10 10 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 822: ...Appendices A 174 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 823: ...AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586 I 1 I Index...
Страница 826: ...I 4 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586 Appendices...
Страница 827: ......





















































