





























SD710 Series Servo Drive Technical Manual Chapter 6 Adjustment
21
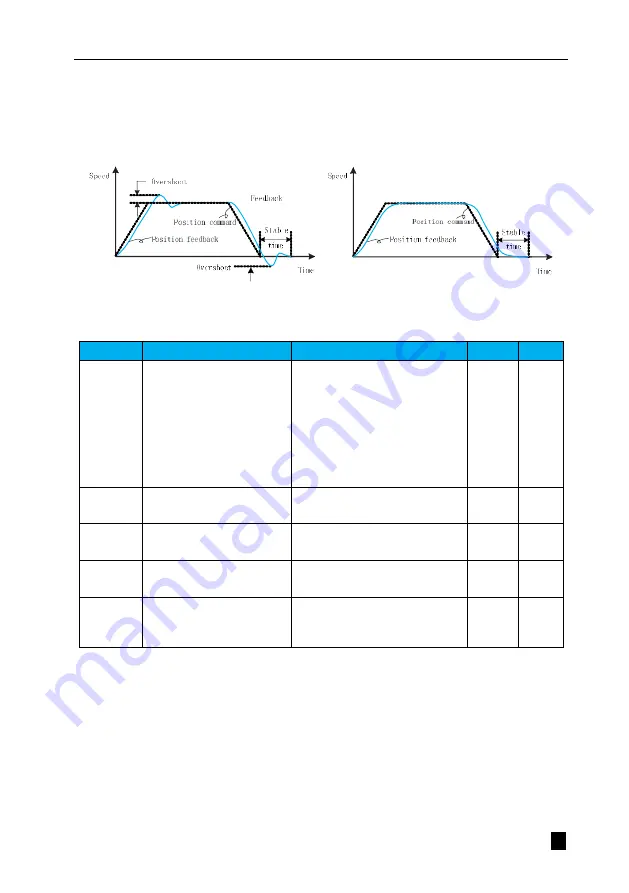
(2) Automatic switching
Automatic PI-P switching is performed by setting the switching conditions via Pn131 and setting the switching condition
values via Pn10C to Pn10F. By setting the switching conditions and condition values appropriately, overshoot during
acceleration and deceleration can be suppressed and the stabilization time can be shortened.
Unswitched PI adjustment effect Automatic switching PI-P condition effect
Fn No.
Parameter
Range
Default
Unit
Pn130.X
Speed loop PI-P switching
condition selector switch
0: Conditional on internal torque
command
1: Conditional on speed command
2: Conditioned on acceleration
3: Conditioned on position deviation
pulses
4: No mode switch function
0
-
Pn132
Speed loop PI-P switching
condition (torque command)
0 to 800
200
%
Pn133
Speed loop PI-P switching
condition (speed command)
0 to 10,000
0
rpm
Pn134
Velocity loop PI-P switching
condition (acceleration)
0 to 30,000
0
rpm/s
Pn135
Speed loop PI-P switching
condition (position deviation)
0 to 10,000
0
comm
and
unit
Switching commissioning of the mode switch as torque command
When the switching condition of the mode switch is used as the torque command (default), the torque command exceeds
the torque set in Pn132 and the speed loop will switch to P control, see Figure 6.8. The factory torque command value is
set to 200%.







































































