





























SD710 Series Servo Drive User Manal Chapter 11 Communication
21
11.2.7 Control mode
11.2.7.1 Profile position mode (pp)
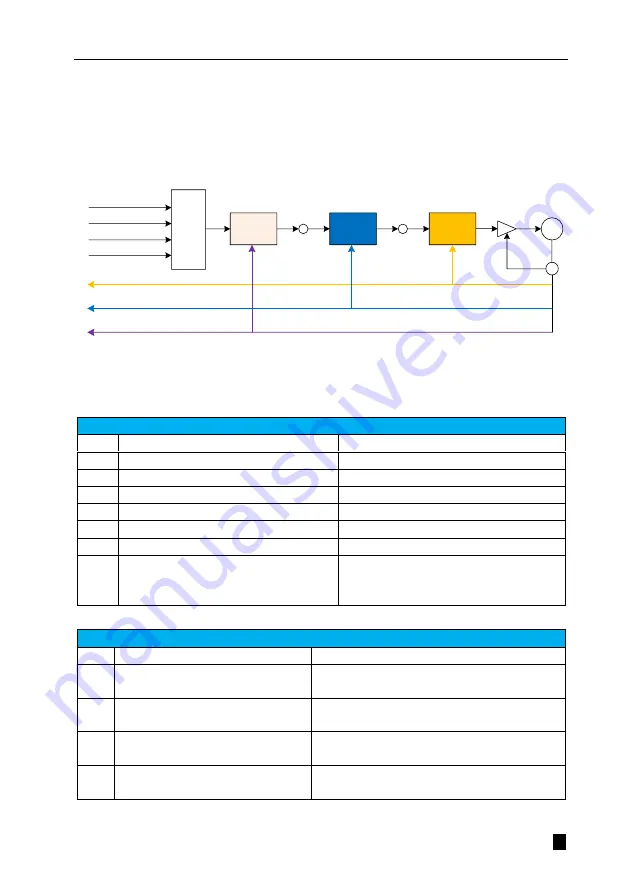
When in profile position mode, the master sends the required target position (absolute or relative), speed, acceleration
and deceleration of the position curve, and other related object dictionaries to the servo drive, which generates the target
curve command based on the received related data and commands.
Position
control
Speed
control
Torque
control
M
S
Actual position value 0x6064
Actual speed value 0x606C
Actual torque value 0x6077
Profile deceleration 0x6084
Profile acceleration 0x6083
Target position 0x607A
Profile speed 0x6081
Curve
Figure 11.10 Block diagram of profile position mode control
Dictionary of related objects.
Control word 6040h
Bit
Name
Description
0
Servo Ready (Switch On)
0: invalid; 1: valid
1
Turn on main circuit power (Enable Voltage)
0: invalid; 1: valid
2
Quick Stop
0: valid; 1: invalid
3
Servo operation (Enable Operation)
0: invalid; 1: valid
4
New Set-Point
Rising edge triggers a new target position
5
Change Set Immediately
0: not immediately updated; 1: immediately updated
6
Absolute position command / Relative position
command (Abs/Rel)
0: The target position is an absolute position
command
1: The target position is a relative position command
Status word 6041h
Bit
Name
Description
10
Target Reached
0: Target position not reached
1: Target position reached
12
Target Position Update (Set Point
Acknowledge)
0: Target position can be updated
1: Target position cannot be updated
13
Following error
0: No excessive position deviation fault
1: Excessive position deviation fault occurs
15
Home Return Complete (Home Find)
0: Home return not completed
1: Home return complete







































































