





























SD710 Series Servo User Manual Chapter 9 Parameter description
5
Caution
● For the vertical axis, the workpiece may
fall after entering overtravel due to the holding brake (/BK)
signal being turned on (holding brake released). To prevent the workpiece from falling, set the "servo
motor to enter the zero position fixed state after stopping (Pn007=1)".
● When an external
force is applied, the motor will be blocked at the base after stopping when it enters
overtravel, and the load shaft end may be pushed back by the external force. To prevent the servo motor
from being pushed back by an external force, set the "servo motor to zero fixed state after stopping
(Pn007=1)".
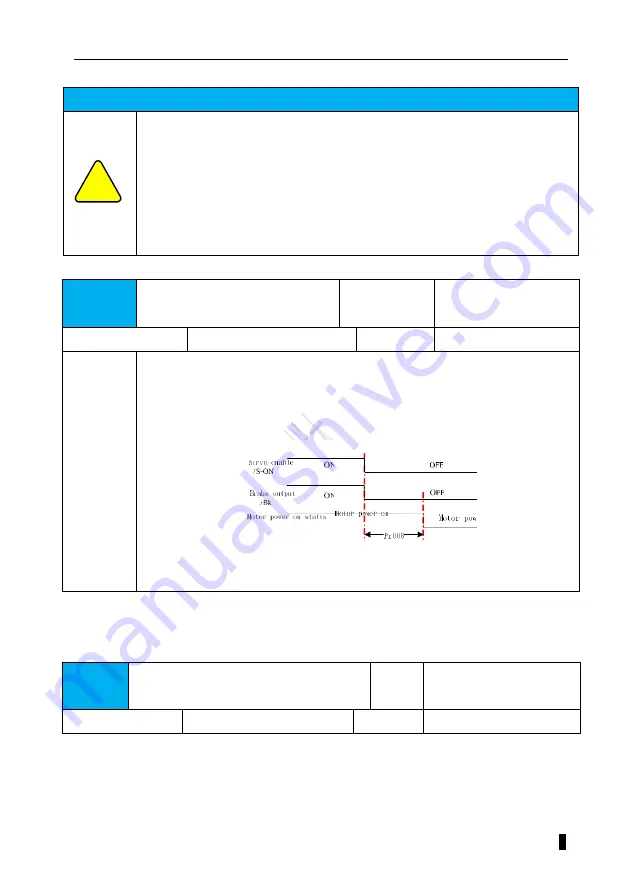
Pn008
Brake command - Motor output delay time
when servo is OFF
○
Communication
address:
0x0008
Factory value: 0
Setting range: 0 to 2000
Unit: ms
Control mode.
□
P
□
S
□
T
Parameter
Description
When the servo motor is stopped, the brake (/BK) signal and the servo ON (/S-ON) signal are turned off
at the same time. By setting this function code, the time from when the servo ON (/S-ON) signal is turned
off to when the motor actually enters the non-energized state can be changed.
When used for vertical axes, the self-weight or external force of the mechanical moving part may cause
slight mechanical movement. By setting this function code, the motor can be energized for an extended
period of time after the brake is applied to eliminate slight mechanical movement.
Note:
When an alarm occurs, independent of this setting, the servo motor immediately enters a non-
energized state, at which time the machine may sometimes move before the brake acts due to the self-
weight of the mechanical moving part or external forces, etc.
Pn009
Servo OFF-Brake command wait time
○
Communication
address:
0x0009
Factory value: 50
Setting range: 0 to 2000
Unit: ms
Control mode
.
□
P
□
S
□
T
!







































































