iPOS80x0 BX-
CAN / CAT
Intelligent Servo Drive
for Step, DC, Brushless
DC and AC Motors
Intelligent Servo Drives
Technical
Reference
Technosoft 2021
P091.029.iPOS80x0.BX.UM.0521
Page 1: ...iPOS80x0 BX CAN CAT Intelligent Servo Drive for Step DC Brushless DC and AC Motors Intelligent Servo Drives Technical Reference Technosoft 2021 P091 029 iPOS80x0 BX UM 0521 ...
Page 2: ...oard Dimensions 12 3 2 Mechanical Mounting 13 3 3 Connectors and Pinouts 13 3 3 1 Pinouts for iPOS80x0 BX CAN 13 3 3 2 Mating Connectors for CAN and CAT 14 3 3 3 Pinouts for iPOS80x0 BX CAT 14 3 4 Connection diagrams 15 3 4 1 iPOS80x0 BX CAN connection diagram 15 3 4 2 iPOS80x0 BX CAT connection diagram 16 3 4 3 24V Digital I O Connection 17 3 4 3 1 PNP inputs 17 3 4 3 2 NPN inputs 17 3 4 3 3 NPN ...
Page 3: ...bling Autorun for CAN drives 31 3 4 11 2 Disabling the setup table at startup for CAT drives 31 3 5 CAN Operation Mode and Axis ID Selection for CAN drives SW1 settings 32 3 6 Axis ID Selection for CAT drives J1 pin settings 32 3 7 LED indicators 33 3 7 1 LEDs for CAN drives 33 3 7 2 LEDs for CAT drives 33 3 7 2 1 EtherCAT ST LED indicator 33 3 8 Electrical Specifications 34 3 8 1 Operating Condit...
Page 4: ...e options A CANopen master1 or an EtherCAT master2 The drives built in motion controller executing a Technosoft Motion Language TML program developed using Technosoft EasyMotion Studio software A TML_LIB motion library for PCs Windows or Linux 3 A TML_LIB motion library for PLCs 3 A distributed control approach which combines the above options like for example a host calling motion functions progr...
Page 5: ... Annex A IEC 61800 7 201 and IEC 61800 7 301 standards CoE Programming part no P091 064 UM xxxx explains how to program the Technosoft intelligent drives using CAN application protocol over EtherCAT and describes the associated object dictionary Motion Programming using EasyMotion Studio part no P091 034 ESM UM xxxx describes how to use the EasyMotion Studio to create motion programs using in Tech...
Page 6: ...ctions listed hereunder This information is intended to protect you the drive and the accompanying equipment during the product operation Incorrect handling of the drive can lead to personal injury or material damage The following safety symbols are used in this manual WARNING SIGNALS A DANGER TO THE OPERATOR WHICH MIGHT CAUSE BODILY INJURY MAY INCLUDE INSTRUCTIONS TO PREVENT THIS SITUATION CAUTIO...
Page 7: ...nce with the RoHS directive 2002 95 EC on the restriction of the use of certain hazardous substances in electrical and electronic equipment RoHS Technosoft SA hereby declares that this product conforms to the following European applicable directives 2014 30 EU Electromagnetic Compatibility EMC Directive 2014 35 EU Low Voltage Directive LVD 93 68 EEC CE Marking Directive Conflict minerals statement...
Page 8: ... both the development time and the overall communication requirements For example instead of trying to command each movement of an axis you can program the drives using TML to execute complex motion tasks and inform the master when these tasks are done Thus for each axis control the master job may be reduced at calling TML functions stored in the drive EEPROM and waiting for a message which confir...
Page 9: ...esign Sinusoidal FOC or trapezoidal Hall based control of brushless motors Open or closed loop control of 2 and 3 phase steppers STO 2 safe torque off inputs safety integrity level SIL3 Cat3 PLe acc to EN61800 5 1 2 EN61508 3 4 EN ISO 13849 1 When left not connected will disable the motor outputs This provides a dual redundant hardware protection that cannot be overdriven by the software or other ...
Page 10: ... supported protocols for for CAT drives CoE CAN application protocol over EtherCAT FoE File over EtherCAT for setup TML functions and firmware update EoE Ethernet over EtherCAT for Easy Motion studio communication over EtherCAT 16K 16 internal SRAM memory for data acquisition 16K 16 E2 ROM to store TML motion programs cam tables and other user data PWM switching frequency up to 100kHz Motor supply...
Page 11: ...ons The position and or speed are controlled using one feedback sensor The other available feedback sensor input can be used for External reference Position or Velocity Pulse and Direction Electronic Gearing or Camming The drive can be delivered with FDBK 1 as single ended upon request Motor Sensor Brushless PMSM Brushless BLDC DC Brush Stepper 2 phase Stepper 3 phase Sensor type Sensor location I...
Page 12: ...ifferential Digital Halls SSI BiSS C encoder only on load Stepper 2ph Incremental encoder differential Analogue Sin Cos encoder Incremental encoder differential SSI BiSS C encoder DC Brush Incremental encoder differential Analogue Sin Cos encoder Analogue Tacho only on motor Incremental encoder differential SSI BiSS C encoder Each defined motor type can have any combination of the supported feedba...
Page 13: ...ing the provided mounting holes and the recommended mating connectors as specified in chapter 3 3 2 Mating Connectors for CAN and CAT The metallic support must act as a cooling heat sink For thermal calculations use the graphs below Power Losses 10A applies to iPOS8010 and Power Losses 20A applies to iPOS8020 3 3 Connectors and Pinouts 3 3 1 Pinouts for iPOS80x0 BX CAN ...
Page 14: ...en CTBA9208 4FL J2 Motor power 5x5 08 female counter part for cable Camden CTBA9208 5FL J3 J4 Feedback 1 Hall Feedback 2 generic 15 pin High Density D Sub male J9 RS232 generic RJ10 4 4 phone plug J5 I O Analog generic 15 pin D Sub male DB15 J8 MICROFIT RECEPTACLE HOUSING 2x2 WAY MOLEX 43025 0400 J8 CRIMP PIN MICROFIT 5A MOLEX 43030 0007 J6 J7 Standard 8P8C modular jack RJ 45 male 3 3 3 Pinouts fo...
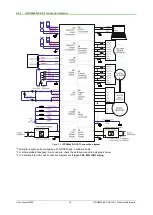
Page 15: ...Connection diagrams 3 4 1 iPOS80x0 BX CAN connection diagram Figure 3 2 iPOS80x0 BX CAN Connection diagram The digital inputs can be configured as PNP NPN type in software setup For other available feedback motor options check the detailed connection diagrams below ...
Page 16: ...n diagram Figure 3 3 iPOS80x0 BX CAT Connection diagram The digital inputs can be configured as PNP NPN type in software setup For other available feedback motor options check the detailed connection diagrams below For a detailed EtherCAT bus connection diagram see Figure 3 26 EtherCAT wiring ...
Page 17: ...voltage value 12 36V to change its default state 3 The length of the cables must be up to 30m reducing the exposure to voltage surge in industrial environment 3 4 3 2 NPN inputs Figure 3 5 24V Digital NPN Inputs connection Remarks 1 The inputs are selectable as PNP NPN by software 2 The inputs are compatible with NPN type outputs input must be pulled to GND to change its default state 3 The length...
Page 18: ...N CAT Technical Reference 3 4 3 3 NPN outputs Figure 3 6 24V Digital NPN Outputs connection Remark The outputs are compatible with NPN type inputs load is tied to common VLOG output pulls to GND when active and is floating when inactive ...
Page 19: ...2nd wire connects the signal ground to the drive negative input b If the analog signal source is differential and the signal source ground is isolated from the drive GND use a 3 wire shielded cable as follows 1st wire connects the signal plus to the drive positive input 2nd wire connects the signal minus to the drive negative input and 3rd wire connects the source ground to the drive GND c If the ...
Page 20: ...k To hardware enable the motor outputs connect STO1 and STO2 pins to Vlog and STO1 and STO2 to GND 3 4 5 2 2 phase Step Motor connection Figure 3 10 2 phase step motor connection one coil per phase Remark To hardware enable the motor outputs connect STO1 and STO2 pins to Vlog and STO1 and STO2 to GND Figure 3 11 2 phase step motor connection two coils per phase ...
Page 21: ...tion Remark To hardware enable the motor outputs connect STO1 and STO2 pins to Vlog and STO1 and STO2 to GND 3 4 5 5 Recommendations for motor wiring a Avoid running the motor wires in parallel with other wires for a distance longer than 2 meters If this situation cannot be avoided use a shielded cable for the motor wires Connect the cable shield to the iPOS80x0 GND pin Leave the other end disconn...
Page 22: ...o 120Ω 0 25W present in the drive 2 The length of the cables must be up to 30m reducing the exposure to voltage surges in industrial environment 3 4 6 2 Differential Incremental Encoder 2 Connection Figure 3 15 Differential incremental encoder 2 connection Remarks 1 The encoder 2 input has internal terminators equivalent to 120Ω 0 25W present in the drive 2 The length of the cables must be up to 3...
Page 23: ...Figure 3 16 J4 Master Slave connection using encoder 2 input 3 4 6 3 Pulse and direction connection Figure 3 17 Pulse and direction connection Remark the same pulse and direction connection can be done on J3 Encoder 1 using the same pin numbers as for Encoder 2 ...
Page 24: ... by another device like for example an encoder and the connection cable is longer than 5 meters add a decoupling capacitor near the supplied device between the 5V and GND lines The capacitor value can be 1 10 μF rated at 6 3V 3 4 6 5 Digital Hall Connection for Motor Hall Incremental Encoder Figure 3 19 Digital Hall connection Remarks 1 This connection is required when using Hall start method BLDC...
Page 25: ... connection 3 4 6 7 BiSS Encoder 2 Connection Figure 3 21 BiSS C encoder 2 connection Remarks 1 The encoder 2 input has an internal terminator between pins 2 and 3 equivalent to 120Ω 0 25W present in the drive 2 The length of the cables must be up to 30m reducing the exposure to voltage surges in industrial environment ...
Page 26: ...he Earth protection near the external motor power supply terminals i e between EARTH and minus of Vmot external power supply 3 4 7 3 Recommendations to limit over voltage during braking During abrupt motion brakes or reversals the regenerative energy is injected into the motor power supply This may cause an increase of the motor supply voltage depending on the power supply characteristics If the v...
Page 27: ... drive is used with a step motor The chopping resistor option can be found in the Drive Setup dialogue within EasyMotion EasySetup The chopping will occur when DC bus voltage increases over UCHOP This parameter UCHOP should be adjusted depending on the nominal motor supply Optimally from a braking point of view UCHOP should be a few volts above the maximum nominal supply voltage This setting will ...
Page 28: ...4 8 Serial RS 232 connection 3 4 8 1 Serial RS 232 connection Figure 3 23 Serial RS 232 connection 3 4 8 2 Recommendation for wiring a If you build the serial cable you can use a 3 wire shielded cable with shield connected to BOTH ends Do not use the shield as GND The ground wire pin 1 or 4 of J9 must be included inside the shield like the 232Rx and 232Tx signals All metallic connector shells are ...
Page 29: ...not insulated from other iPOS80x0 circuits 3 4 9 2 Recommendation for wiring a Build CAN network using cables with twisted wires 2 wires pair with CAN Hi twisted together with CAN Lo It is recommended but not mandatory to use a shielded cable If so connect the shield to GND The cable impedance must be 105 135 ohms 120 ohms typical and a capacitance below 30pF meter b The 120Ω termination resistors...
Page 30: ...sual representation of the linear topology Ring when the J7 OUT port of the last drive in the chain is connected back to the master controller on the 2nd port of the master This topology consists of the linear topology described above plus an extra connection between the master which has two RJ45 ports to J7 OUT of the last drive See Figure 3 28 for a visual representation of the ring topology e R...
Page 31: ...ly useful when it is not possible to communicate with the drive After the drive is set in non Autorun slave mode using 2nd method the 1st method may be used to invalidate the TML application from the EEPROM On next power on in absence of a valid TML application the drive enters in the non Autorun slave mode independently of the digital Hall inputs status 3 4 11 2 Disabling the setup table at start...
Page 32: ...iA 305 protocol A non configured drive answers only to CiA 305 commands All other CANopen commands are ignored and transmission of all other messages including boot up is disabled The Ready green LED will flash at 1 second time intervals while in this mode 3 6 Axis ID Selection for CAT drives J1 pin settings The iPOS80x0 BX CAT drives support all EtherCAT standard addressing modes In case of devic...
Page 33: ...ects an error condition or when OUT2 Error is set to Vlog with OUT 2 0 TML instruction 2 EtherCAT ST red and green EtherCAT ERROR and RUN indicators combined Shows the state of the EtherCAT Status Machine 3 EtherCAT OUT Link Activity green Shows the state of the physical link and activity 4 EtherCAT IN Link Activity green Shows the state of the physical link and activity 3 7 2 1 EtherCAT ST LED in...
Page 34: ...tions All parameters measuredunderthefollowingconditions unless otherwisespecified Tamb 0 40 C VLOG 24 VDC VMOT 80VDC Supplies start up shutdown sequence any Load current sinusoidal amplitude continuous BLDC DC stepper 10A iPOS8010 20A iPOS8020 3 8 1 Operating Conditions Min Typ Max Units Ambient temperature1 0 40 ºC Ambient humidity Non condensing 0 90 Rh Altitude pressure2 Altitude referenced to...
Page 35: ...cuit protection delay 5 10 µs On state voltage drop Nominal output current including typical mating connector contact resistance 0 3 0 5 V Off state leakage current 0 5 1 mA Motor inductance phase to phase Recommended value for ripple 5 of measurement range VMOT 80 V FPWM 20 kHz 330 µH FPWM 40 kHz 150 FPWM 60 kHz 120 Absolute minimum value limited by short circuit protection VMOT 80 V FPWM 20 kHz ...
Page 36: ...GH source current external load to GND VOUT 2 0V OUT2 Error OUT3 Ready 2 5 mA OUT0 OUT1 7 mA Logic HIGH leakage current external load to VLOG VOUT VLOG max 40V 0 05 0 7 mA Minimum pulse width 0 5 µs ESD protection Human body model 15 kV 3 8 10 Digital Hall Inputs Hall1 Hall2 Hall3 Min Typ Max Units Mode compliance TTL CMOS Open collector Default state Input floating wiring disconnected Logic HIGH ...
Page 37: ...differential load 2 0 2 5 5 0 V Common mode referenced to GND 2 3 2 5 2 7 CLOCK frequency Software selectable 1000 2000 3000 kHz DATA Input hysteresis Differential mode 0 1 0 2 0 5 V Data input impedance Termination resistor on board 120 Ω DATA Input common mode range Referenced to GND 7 12 V Absolute maximum surge duration 1s 25 25 DATA format Software selectable Binary Gray Single turn Multi tur...
Page 38: ...error 1 3 FS1 Bandwidth 3dB Software selectable 0 600 Hz ESD protection Human body model 2 kV 3 8 17 Analog 10V Input REF Min Typ Max Units Differential voltage range 10 V Common mode voltage range Referenced to GND 12 0 10 50 V Input impedance Differential 40 kΩ Common mode impedance Referenced to GND 20 kΩ Resolution 12 bits Integral linearity 4 LSB Differential Linearity No missing codes 1 LSB ...
Page 39: ... safety integrity level 3 SIL3 PFHd Probability of Failures per Hour dangerous 8 10 10 hour 1 0 8 FIT EN13849 1 Classification Performance Level Cat3 PLe MTTFd meantime to dangerous failure 377 years Mode compliance PNP Default state Input floating wiring disconnected Logic LOW Input voltage Logic LOW PWM operation disabled 20 5 6 V Logic HIGH PWM operation enabled 18 36 Absolute maximum continuou...
Page 40: ...0 BX CAT De rating with ambient temperature Figure 3 37 iPOS8010 BX CAN CAT Over current diagram Figure 3 38 iPOS8020 BX CAN CAT Over current diagram Figure 3 39 iPOS80x0 BX CAN CAT Output Voltage De rating with PWM frequency1 Figure 3 40 iPOS80x0 BX CAN CAT De rating with altitude CAUTION FOR PWM FREQUENCIES LESS THAN 20 KHZ CORRELATE THE PWM FREQUENCY WITH THE MOTOR PARAMETERS IN ORDER TO AVOID ...
Page 41: ... run time The E2 ROM is mapped in the address range 4000h to 7FFFh It is used to keep in a non volatile memory the TML programs the cam tables and the drive setup information Remark EasyMotion Studio handles automatically the memory allocation for each motion application The memory map can be accessed and modified from the main folder of each application Figure 7 1 iPOS80x0 BX Memory Map TML Progr...