
























Technosoft 2020
12
iPOS80x0 BX-CAN/-CAT Technical Reference
2.4.2
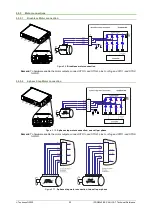
Dual loop configurations
The motor speed control loop is closed on one feedback connected on the motor while the motor position
control loop is closed on the other available feedback which is placed on the load. There is usually a transmission
between the load and the motor.
Motor
type
Feedback #1
Feedback #2
PMSM
•
Incremental encoder (differential)
•
Analogue Sin/Cos encoder
•
Incremental encoder (differential)
•
SSI/BiSS C encoder
BLDC
•
Incremental encoder
(differential) + Digital halls
•
Incremental encoder (differential) + Digital
Halls
•
SSI/BiSS C encoder (only on load)
Stepper
2ph
•
Incremental encoder (differential)
•
Analogue Sin/Cos encoder
•
Incremental encoder (differential)
•
SSI/BiSS C encoder
DC
Brush
•
Incremental encoder (differential)
•
Analogue Sin/Cos encoder
•
Analogue Tacho (only on motor)
•
Incremental encoder (differential)
•
SSI/BiSS C encoder
Each defined motor type can have any combination of the supported feedbacks either on motor or on load.
Example:
-PMSM motor with Incremental encoder (from feedback #1) on motor and Incremental encoder (from feedback#2)
on load
-DC brush motor with SSI encoder (from feedback #2) on motor and Sin/Cos encoder (from feedback #1) on load.
3
Hardware Installation
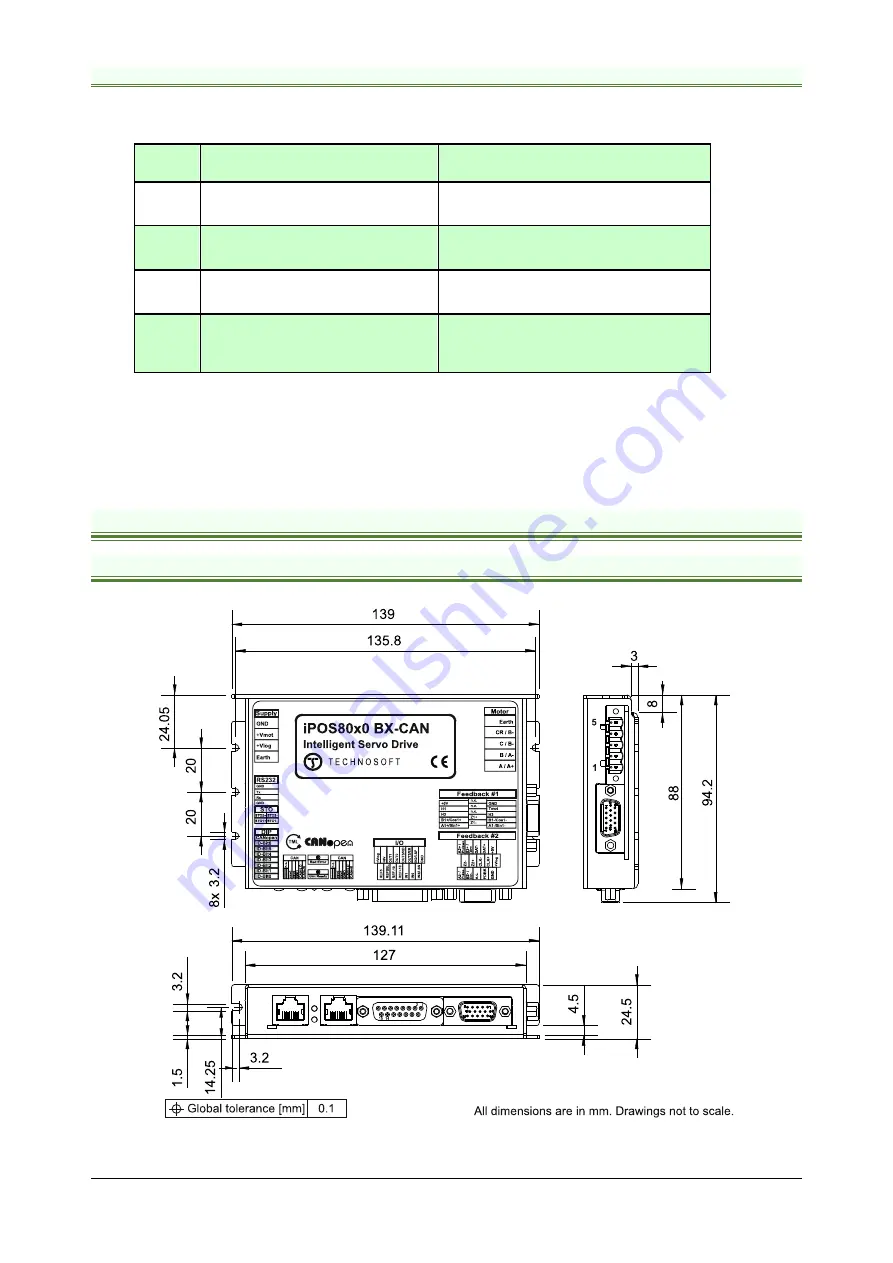
3.1
iPOS80x0 BX-CAN/CAT Board Dimensions
Figure 3.1.1.
iPOS80x0 BX-CAN/CAT drive dimensions







































































