




























Technosoft 2020
17
iPOS80x0 BX-CAN/-CAT Technical Reference
3.4.3
24V Digital I/O Connection
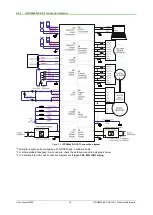
3.4.3.1
PNP inputs
Figure 3.4.
24V Digital PNP Inputs connection
Remarks:
1. The inputs are selectable as PNP/ NPN by software.
2. The inputs are compatible with PNP type outputs (input must receive a positive voltage value (12-36V) to
change its default state)
3. The length of the cables must be up to 30m, reducing the exposure to voltage surge in industrial environment.
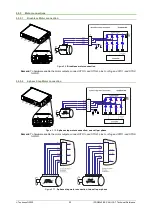
3.4.3.2
NPN inputs
Figure 3.5.
24V Digital NPN Inputs connection
Remarks:
1. The inputs are selectable as PNP/ NPN by software.
2. The inputs are compatible with NPN type outputs (input must be pulled to GND to change its default state)
3. The length of the cables must be up to 30m, reducing the exposure to voltage surges in industrial environment.







































































