





























3
F
unction
d
iag
ram
s
3.15
Basic positioner
(EPOS)
SINAMICS G120
C
U
250S-2 C
ontrol Units
87
2
List Manua
l, 09/2
017
, A5E3384289
0
F
ig.
3
-121
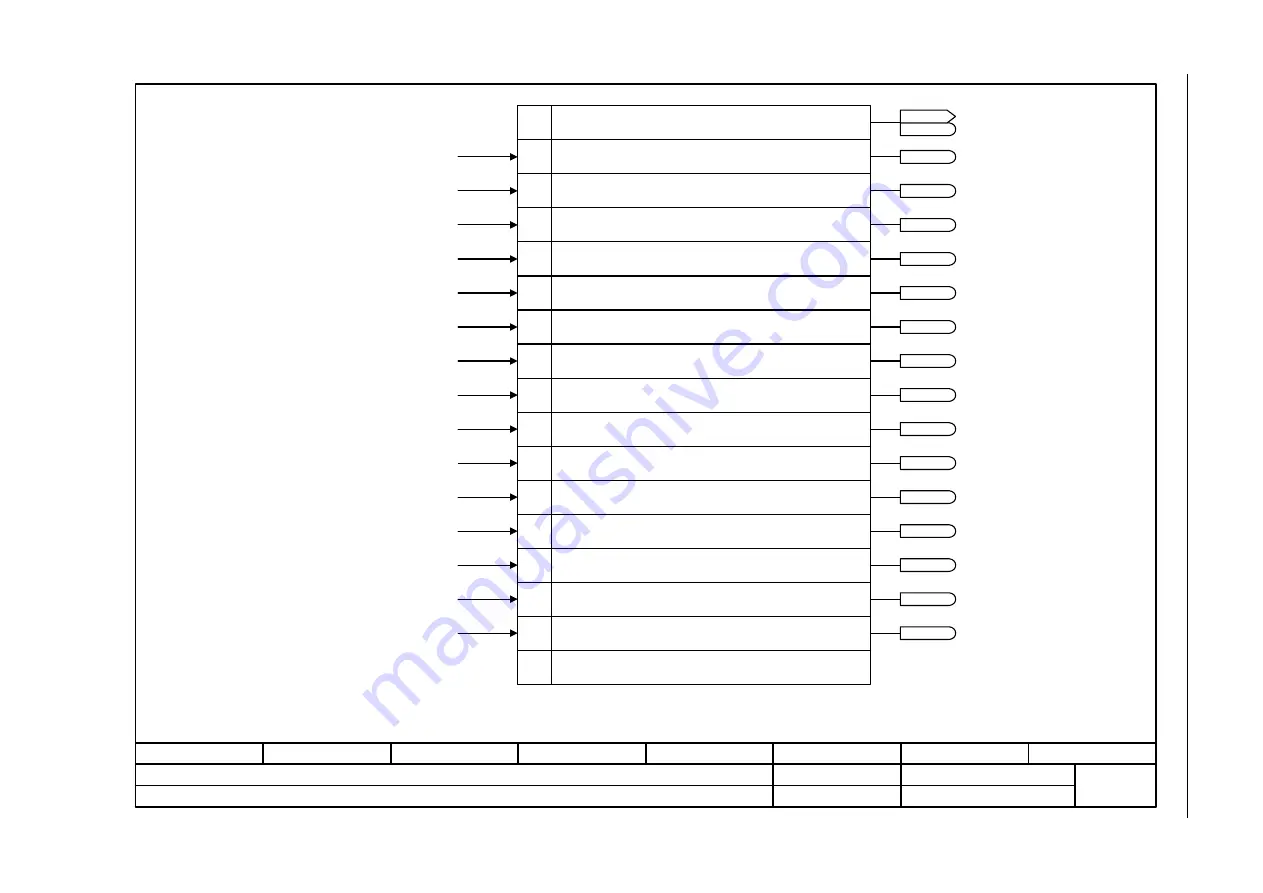
36
45 – Sta
tus word
1
(r26
83)
- 3645 -
Function diagram
8
7
6
5
4
3
2
1
fp_3645_97_55.vsd
Basic positioner (EPOS)
G120 CU250S-2
05.09.2017
V4.7.9
Status word 1 (r2683)
11
12
13
14
15
10
7
6
5
4
3
2
1
0
9
8
1 = Tracking active
1 = Velocity limiting active
1 = Target position reached
1 = Setpoint available
1 = Axis moves forwards
0 = Axis stationary or moves backwards
1 = Axis moves backwards
0 = Axis stationary or moves forwards
1 = Software limit switch minus reached
1 = Position actual value cam switching position 1
0 = Overrun cam switching position 1
1 = Position actual value cam switching position 2
0 = Overrun cam switching position 2
1 = Direct output 1 via the traversing block
1 = Direct output 2 via the traversing block
1 = Fixed stop, clamping torque reached
Reserved
1 = Fixed stop reached
1 = Software limit switch plus reached
1 = Travel to fixed stop active
[3635.7]
[3630.7]
[3635.7]
[3635.7]
[3635.7]
[3635.7]
[3616.7]
[3635.7]
[4025.8]
[3616.7]
[4025.8]
[3616.7]
[3616.7]
[3616.7]
[3635.7]
r2683.0
r2683.1
r2683.4
r2683.5
r2683.11
r2683.2
r2683.6
r2683.9
r2683.7
r2683.8
r2683.10
r2683.12
r2683.13
r2683.14
[4025.6] / p2552
r2683.3
POS_ZSW1
r2683
r2683
From interpolator
From traversing range limits
From dynamic following error monitoring, cam controllers
From “traversing block“ mode
From interpolator
From interpolator
From interpolator
From interpolator
From interpolator
From interpolator
From dynamic following error monitoring, cam controllers
From “traversing block“ mode
From “traversing block“ mode
From “traversing block“ mode
From “traversing block“ mode
Status word, positioning mode
Bit No.
1
[4025.1] / p2553
[4020.1] / p2551
[4020.1]







































































