





























325
No
Abbr.
Parameter function and description
Mode
Default
Range
Unit
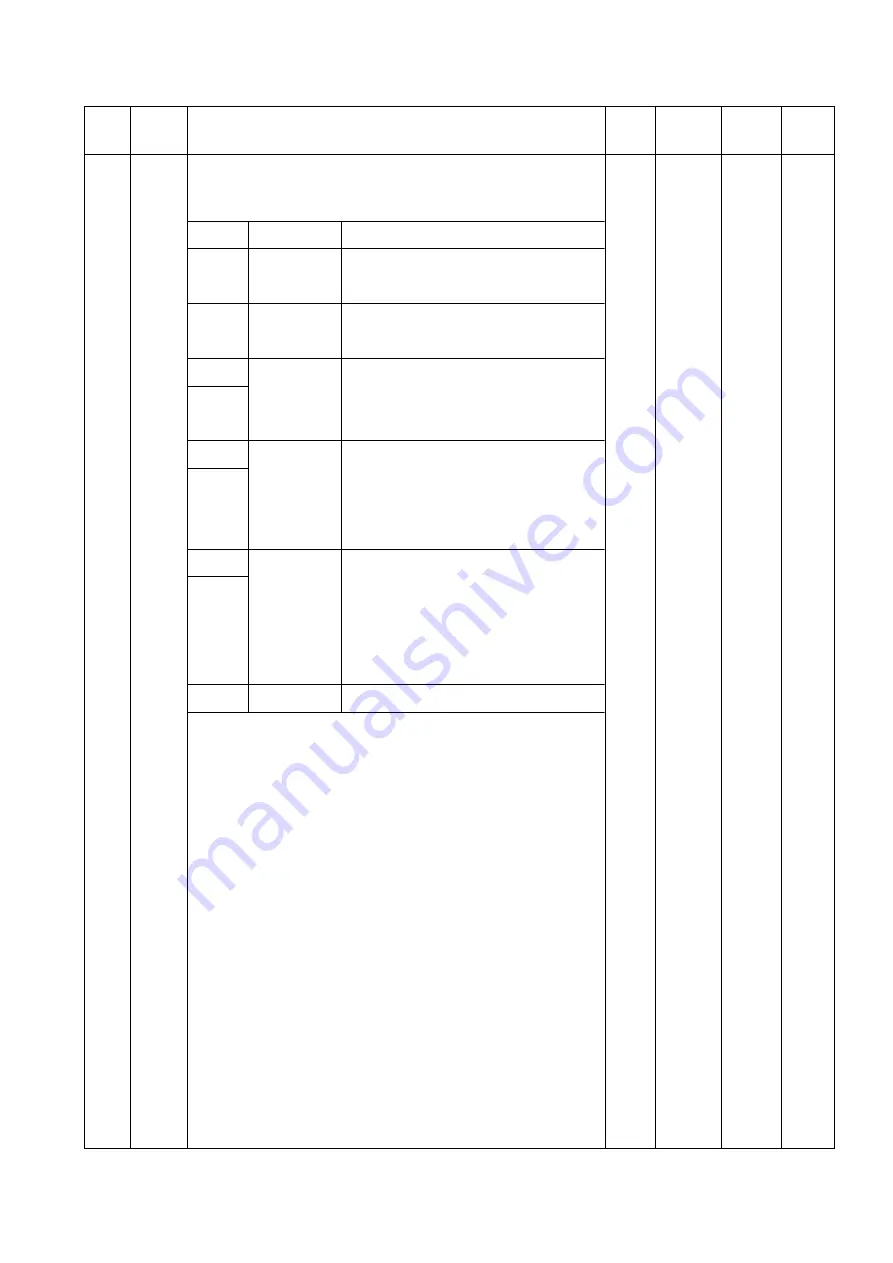
y: masking pulse / virtual pulse correction initial
lead setting
y
Function
Description
0
Function
disabled
Virtual pulse number is not written
to initial lead pulse(PC65).
0
→
1
Write the
lead
Write the virtual pulse number to
Initial lead pulse(PC65).
0
→
2
Write to
ROM
Write the virtual pulse number to
initial lead pulse(PC65) and also
write to EEPROM.
0
→
3
0
→
4
Plus one
cycle
Write the virtual pulse number
plus the pulse of one cycle
(PC62/PC61)
to
initial
lead
pulse(PC65).
0
→
5
0
→
6
Plus one
cycle and
write to
ROM
Write the virtual pulse number
plus the pulse of one cycle
(PC62/PC61)
to
initial
lead
pulse(PC65),
and
write
to
EEPROM.
0
→
7
8~15
Reserved
-
Example: initial lead pulse PC65 = 2000; pulse
number of one cycle is 5000.
1. Virtual pulse number is 255. Set PC83.y to 1, and
then PC65= 2000 + 255 = 2255.
2. Virtual pulse number is 255. Set PC83.y to 4, and
then PC65= 2000 + 255 + 5000 = 7255.
3. Virtual pulse number is -2550. Set PC83.y to 1,
and then PC65= 2000 - 2550 + 5000 = 4450.
uz:
pulse data when master axis performs
continuous forward / reverse running or JOG
operation.
Summary of Contents for SDP Series
Page 33: ...20 400V series DC 24V Power supply Note terminal P N cannot be grounded ...
Page 45: ...32 4 The last step is to fasten the screw of housing ...
Page 385: ...372 ...
Page 405: ...392 ...
Page 499: ...486 SME L040 SME L075 SME L100 SME L150 ...
Page 500: ...487 SME L200 SME L300 SME M100 SME M150 ...
Page 509: ...496 When the load reaches 300 the operation time is 5 51 seconds ...
Page 555: ...542 14 5 Manual version and revision history Manual version V1 00 Release month July 2022 ...







































































