





























185
6.4.6 Position loop gain.
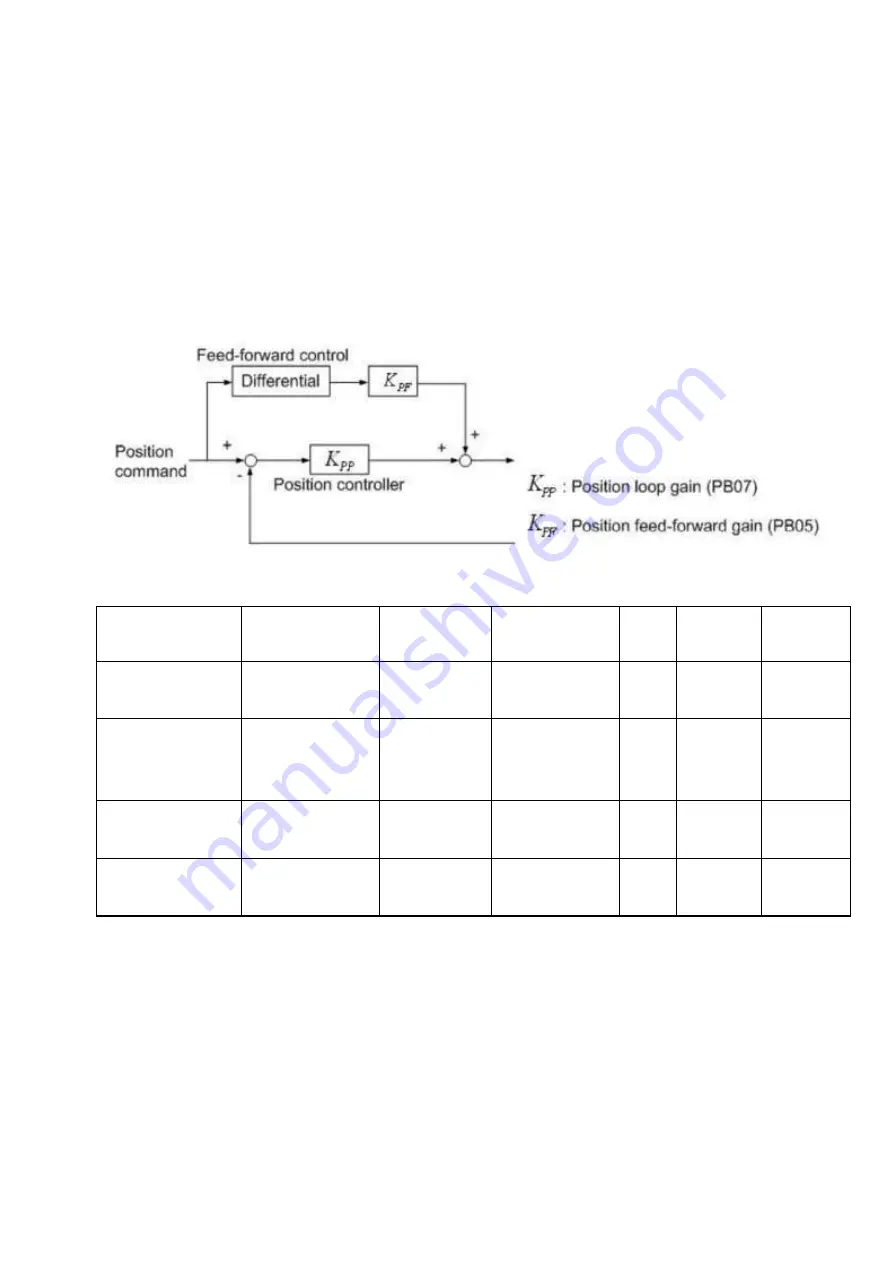
As the position loop is outside control of speed loop, if the user uses the manual mode to
adjust the position loop, it’s necessary to set the speed gain related parameters first (refer to
section 6.3.5), and then set the position proportional gain and the position feed-forward gain.
The position loop gain can be set to a value of 1/4 ~ 1/6 of speed loop gain. The user can also
use the auto-tuning mode to set the position and speed gains automatically. The position loop
diagram is shown as below:
The relevant parameters of position gain adjustment are listed as below:
Name
Parameter
abbreviation
Parameter
code
Setting
range
Unit
Default
value
Control
mode
Auto tuning
mode option
ATUM
PA02
0000h~0004h N/A
0002h
Pt,Pr,S,T
Auto-tuning
response level
setting
ATUL
PA03
1~32
N/A
10
Pt,Pr,S,T
Position feed-
forward gain
FFC
PB05
0~200
%
0
Pt,Pr
Position loop
gain
PG1
PB07
4~1024
rad/s
45
Pt,Pr
When the position loop gain PG1 (PB07) is set too large, although the bandwidth and
response gets faster, the motor will run back and forth with vibration. This is not allowed in the
application which requires precise position control, you must decrease the PG1 value until no
vibration occurs.
If the bandwidth is limited by the machine, which makes the position feedback cannot track
the position command and cannot meet the reasonable position error requirements, you can
use the position feed-forward gain to reduce the dynamic error of the position tracking. In other
words, using position feed-forward gain will increase the position settling time relatively.
Summary of Contents for SDP Series
Page 33: ...20 400V series DC 24V Power supply Note terminal P N cannot be grounded ...
Page 45: ...32 4 The last step is to fasten the screw of housing ...
Page 385: ...372 ...
Page 405: ...392 ...
Page 499: ...486 SME L040 SME L075 SME L100 SME L150 ...
Page 500: ...487 SME L200 SME L300 SME M100 SME M150 ...
Page 509: ...496 When the load reaches 300 the operation time is 5 51 seconds ...
Page 555: ...542 14 5 Manual version and revision history Manual version V1 00 Release month July 2022 ...







































































