





























215
Bit 28~31
Description
0
NOT execute homing when servo starts for the first time
1
Execute homing when servo starts for the first time
ORG_DEF:
the coordinate value of the origin and it may not be 0.
ORG_DEF format
Pulse:
(−2
31
) ~ (2
31
-1)
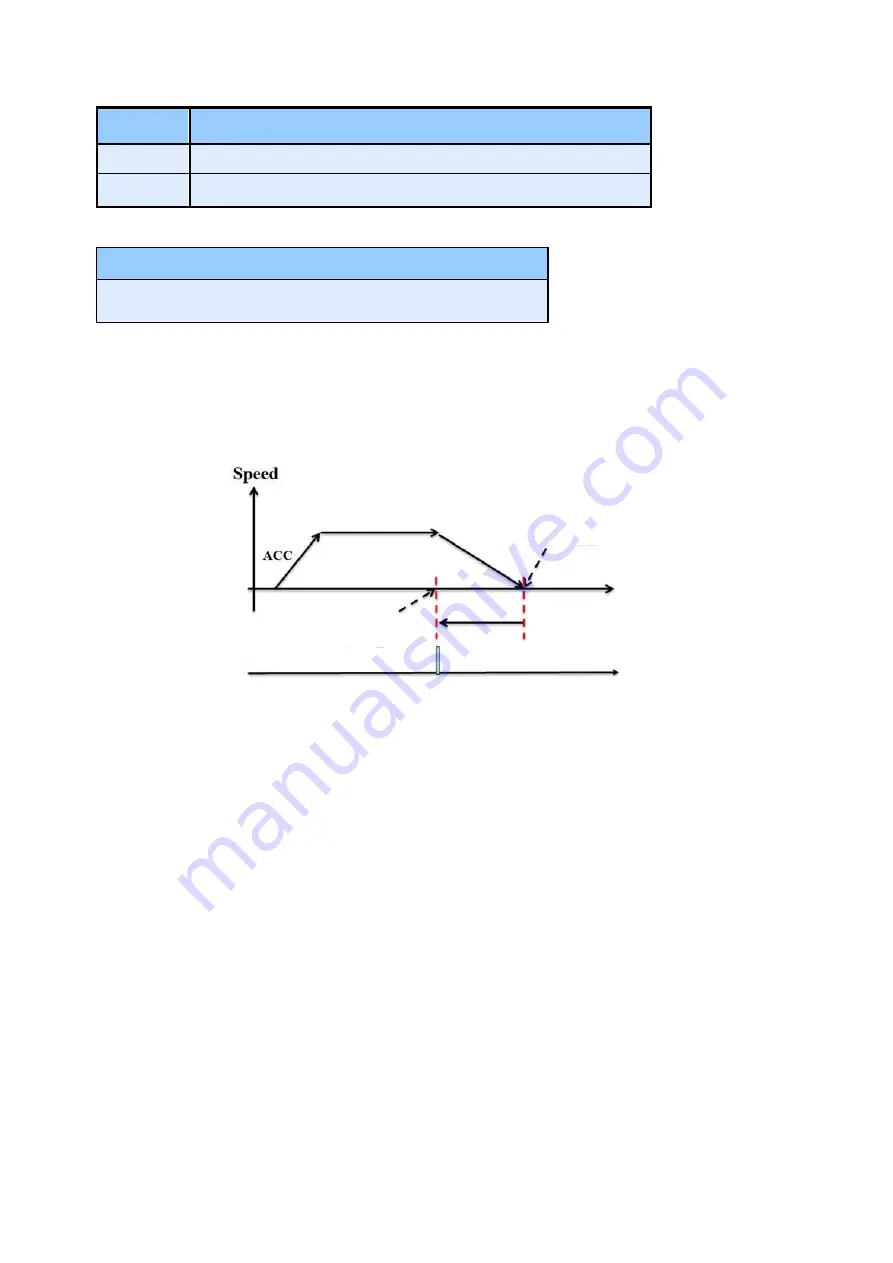
The servo does not provide origin stop mode option, which is to set whether to pull back to
the origin after completion! Since the motor must decelerate to stop after the origin is found
(origin signal or Z pulse), and the stop position will be a little ahead over the origin as shown
in the figure below:
Perform homing
Motor stop position
after homing
Absolute coordinate
Homing coordinate
(ORG_DEF)
Pull back
Origin trigger
signal
If pull back is not needed, set PATH to 0.
If pull back is needed, set PATH=A , which means the servo will execute PATH#A automatically
after homing when PATH#A is set to absolute command for positioning control and command
value =ORG_DEF.
The homing does not define an offset value (Offset), and it uses PATH to specify a path as the
offset value! It is recommended to use absolute positioning command for this path, and set
the command value = offset value(value of absolute coordinates).
7.5 PR sequence status
In PR mode, all 63 groups of programs can be set as five control types: speed control,
positioning, path jump, parameter writing and index positioning. As these 63 programs can
Summary of Contents for SDP Series
Page 33: ...20 400V series DC 24V Power supply Note terminal P N cannot be grounded ...
Page 45: ...32 4 The last step is to fasten the screw of housing ...
Page 385: ...372 ...
Page 405: ...392 ...
Page 499: ...486 SME L040 SME L075 SME L100 SME L150 ...
Page 500: ...487 SME L200 SME L300 SME M100 SME M150 ...
Page 509: ...496 When the load reaches 300 the operation time is 5 51 seconds ...
Page 555: ...542 14 5 Manual version and revision history Manual version V1 00 Release month July 2022 ...







































































