





























Goodrive350-19 series VFD Commissioning
- 82 -
as to reduce the error to 0. The master and slave must be equipped with encoders. The master and
slave adopt speed control, using position pulse difference for speed correction.
Commissioning method:
Set P28.00 to 1 for the master, set P28.00 to 2 for the slave, and set the ones place of P28.02 to 4
both for the master and slave to select master/slave mode 4.
If there is a transmission ratio between the slave and master, set the P28.07, P28.08 and P28.09.
When the pulse difference between the slave and master is greater than P28.09, a fault is reported
directly. When the pulse difference between the slave and master is less than P28.08, speed
correction is not performed. When the pulse difference between the slave and master is greater than
P28.08 but less than P28.09, speed correction is performed, and adjust P28.12, P28.13, and P28.14
when necessary. In addition, you can set P28.10.
The master sends the running command, speed, and position pulse to the slave through CAN
communication. The slave performs speed correction by comparing the local position pulse with the
position pulse sent from the master.
Note:
Open-loop vector control is applicable only to master/slave modes 0
–3, while closed-loop
vector control is applicable to all the master/slave mode.
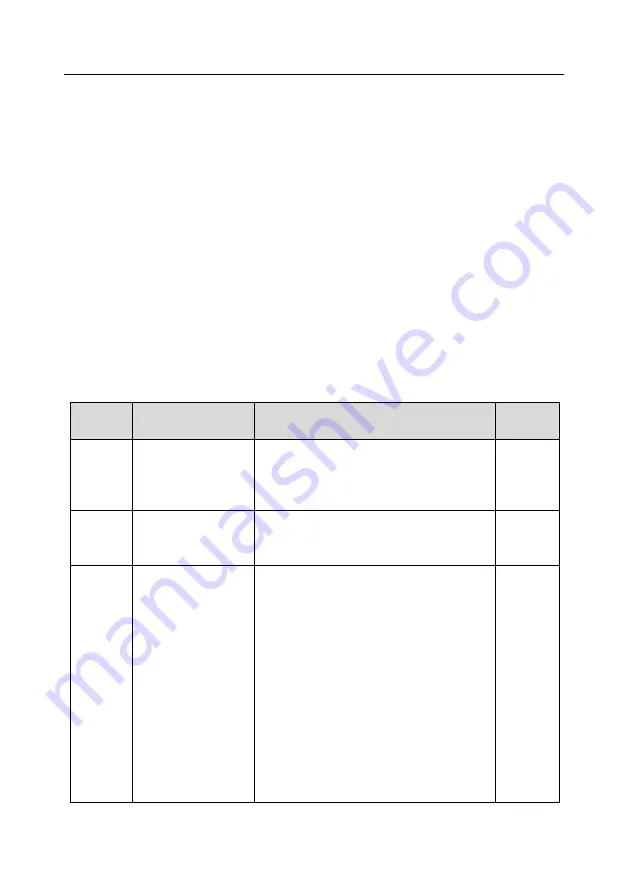
Function
code
Name
Description
Default
P28.00
Master/slave mode
selection
0: The master/slave control is invalid
1: This machine is a master
2: This machine is a slave
0
P28.01
Master/slave
communication
selection
0: CAN
1: Reserved
0
P28.02
Master/slave control
mode
Ones: Master/slave running mode selection
0: Master/slave mode 0
(The master and slave adopt speed control and
maintains the power balance by droop control)
1: Master/slave mode 1
(The master and slave must be in the same
type of vector control mode. The master is
speed control, and the slave will be forced to be
in the torque control mode.)
2: Master/slave mode 2
The slave starts in the speed mode
0x001







































































