





























Goodrive350-19 series VFD Operating
- 123 -
Generally, the I/F control mode is valid for asynchronous motors. It can be used for synchronous
motors only when the motor frequency is extremely low. The I/F control described in this manual is
only involved with asynchronous motors. I/F control is implemented by performing closed-loop control
on the total VFD output current. The output voltage adapts to the current reference, and open-loop
control is separately performed over the frequency of the voltage and current.
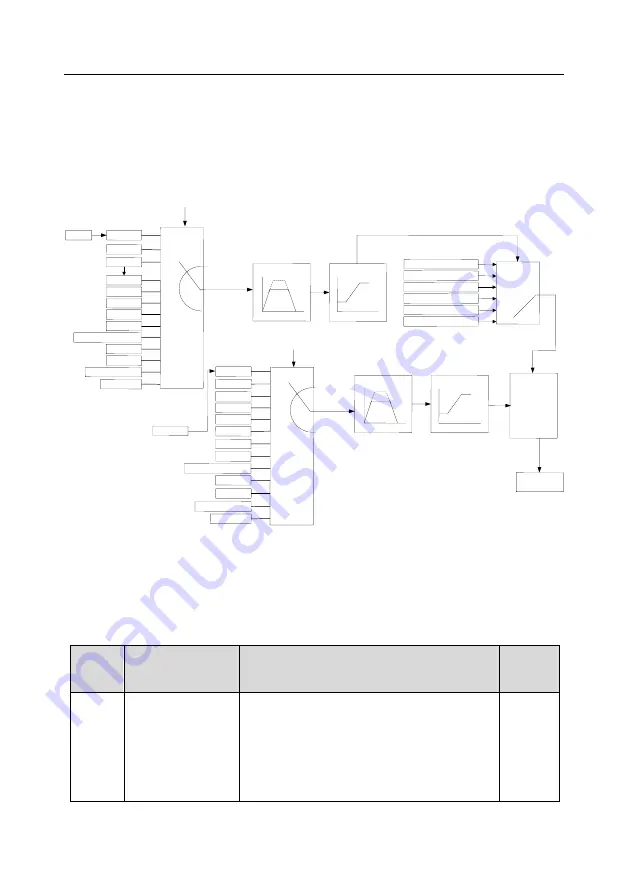
Customized V/F curve (V/F separation) function:
V /F curve
Straight-type V/F curve
Multi-point V/F curve
Customized V/F curve
Torque-down V/F curve (power
2.0)
Torque-down V/F curve (power
1.7)
Torque-down V/F curve (power
1.3)
PWM output
Frequency
setting
Voltage
setting
P04.29 voltage acceleration time
P04.30 voltage deceleration time
P04.31 output max. voltage
P04.32 output min. voltage
P00.11 acceleration time 1
P00.12 deceleration time 1
P00.04 running frequency upper limit
P00.05 running frequency lower limit
P04.00 V/F curve setting of motor 1
0
1
2
3
4
5
6
7
8
9
10
Keypad
AI1
PROFIBUS\CANopen
MODBUS
PID
Multi-step speed
HDIA
AI3
AI2
Ethernet
HDIB
P04.27 (voltage setting
channel)
P04.28
0
1
2
3
4
5
6
7
8
9
10
11
Keypad
AI1
PROFIBUS\CANopen
MODBUS
PID
Multi-step speed
HDIA
AI3
AI2
Ethernet
P00.06 (Setting channel of A frequency
command)
Frequency set through keypad
P00.10
0
1
2
3
4
5
EtherCat/Profinet
PLC card
HDIB
EtherCat/Profinet
PLC card
11
12
12
When selecting customized V/F curve function, you can set the reference channels and
acceleration/deceleration time of voltage and frequency respectively, which will form a real-time V/F
curve through combination.
Note:
This V/F curve separation can be applied in various variable-frequency power source scenarios.
However, exercise cautious when setting parameters as improper setting may damage the machine.
Function
code
Name
Description
Default
value
P00.00
Speed control mode
0:SVC 0
1:SVC 1
2:SVPWM
3:VC
Note:
If 0, 1 or 3 is selected, it is required to carry
out motor parameter autotuning first.
2







































































